

授权公布号:CN108090958B
一种机器人同步定位和地图构建方法和系统
有效
申请
2017-12-06
申请公布
2018-05-29
授权
2021-08-27
预估到期
2037-12-06
| 申请号 | CN201711274095.6 |
| 申请日 | 2017-12-06 |
| 申请公布号 | CN108090958A |
| 申请公布日 | 2018-05-29 |
| 授权公布号 | CN108090958B |
| 授权公告日 | 2021-08-27 |
| 分类号 | G06T17/05;G06T7/246;G06T7/536;G06T7/73;G01C21/00 |
| 分类 | 计算;推算;计数; |
| 申请人名称 | 上海阅面网络科技有限公司 |
| 申请人地址 | 上海市静安区愚园东路28号东海广场3号楼1层 |
专利法律状态
2021-08-27
授权
状态信息
授权
2018-06-22
实质审查的生效
状态信息
实质审查的生效IPC(主分类):G06T 17/05
2018-05-29
公布
状态信息
公布
摘要
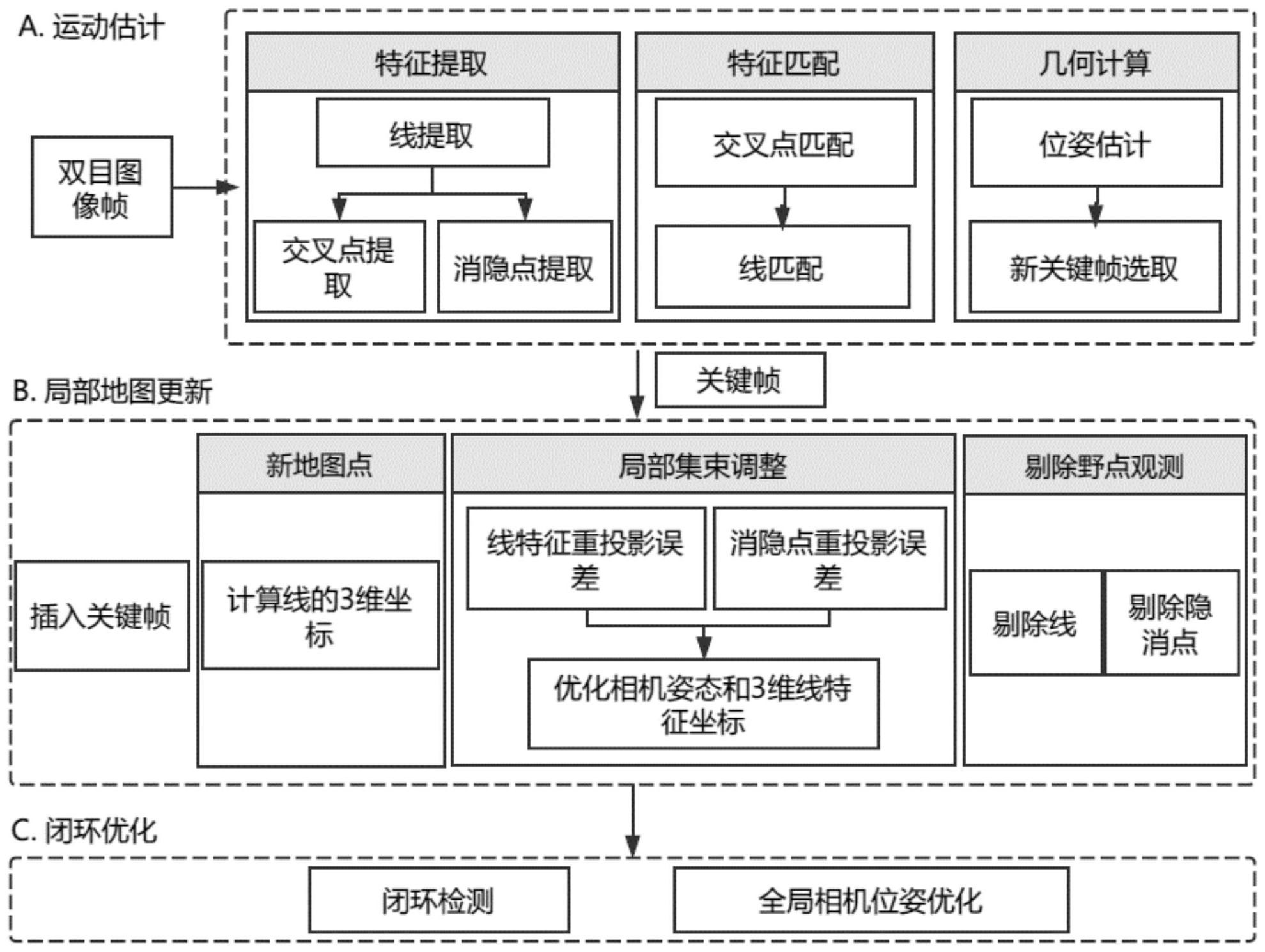
本发明公开了一种基于线段特征和线段消隐点的机器人同步定位和地图构建方法,应用于机器人在未知环境中的定位和地图构建。该方法包括从图像中提取线段特征、交叉点和消隐点,根据交叉点在图像之间建立线段的匹配,根据线段匹配的结果进行相机位姿估计,选取新关键帧;在地图中插入关键帧,计算新加入的线段特征的三维坐标,并进行局部地图的集束调整,剔除野点观测;基于交叉点进行闭环检测和全局的地图优化。本发明还公开了一种同步定位和地图构建系统。本发明可以用于机器人在未知环境中的定位和地图构建,特别适用于结构化或者半结构化的场景中,例如室内环境、室外有建筑的环境等。
 chinappkf
客服微信号
chinappkf
客服微信号
 chinappsw
商务合作
chinappsw
商务合作
 品牌风云榜
关注公众号
品牌风云榜
关注公众号
CopyRight 2005-2026 品牌网 chinapp.com 版权所有