

授权公布号:CN116168062B
一种3D目标跟踪方法及装置
有效
申请
2023-04-21
申请公布
2023-05-26
授权
2023-09-29
预估到期
2043-04-21
| 申请号 | CN202310429796.1 |
| 申请日 | 2023-04-21 |
| 申请公布号 | CN116168062A |
| 申请公布日 | 2023-05-26 |
| 授权公布号 | CN116168062B |
| 授权公告日 | 2023-09-29 |
| 分类号 | G06T7/246;G06T7/277 |
| 分类 | 计算;推算;计数; |
| 申请人名称 | 深圳佑驾创新科技股份有限公司 |
| 申请人地址 | 广东省深圳市福田区沙头街道上沙社区滨河大道9285号中洲滨海商业中心二期1栋A座二十五层 |
专利法律状态
2023-09-29
授权
状态信息
授权
2023-08-22
著录事项变更
状态信息
著录事项变更;IPC(主分类):G06T7/246;变更事项:申请人;变更前:深圳佑驾创新科技有限公司;变更后:深圳佑驾创新科技股份有限公司;变更事项:地址;变更前:518051 广东省深圳市福田区梅林街道梅都社区中康路136号深圳新一代产业园1栋401;变更后:518000 广东省深圳市福田区沙头街道上沙社区滨河大道9285号中洲滨海商业中心二期1栋A座二十五层
2023-06-13
实质审查的生效
状态信息
实质审查的生效;IPC(主分类):G06T7/246;申请日:20230421
2023-05-26
公布
状态信息
公布
摘要
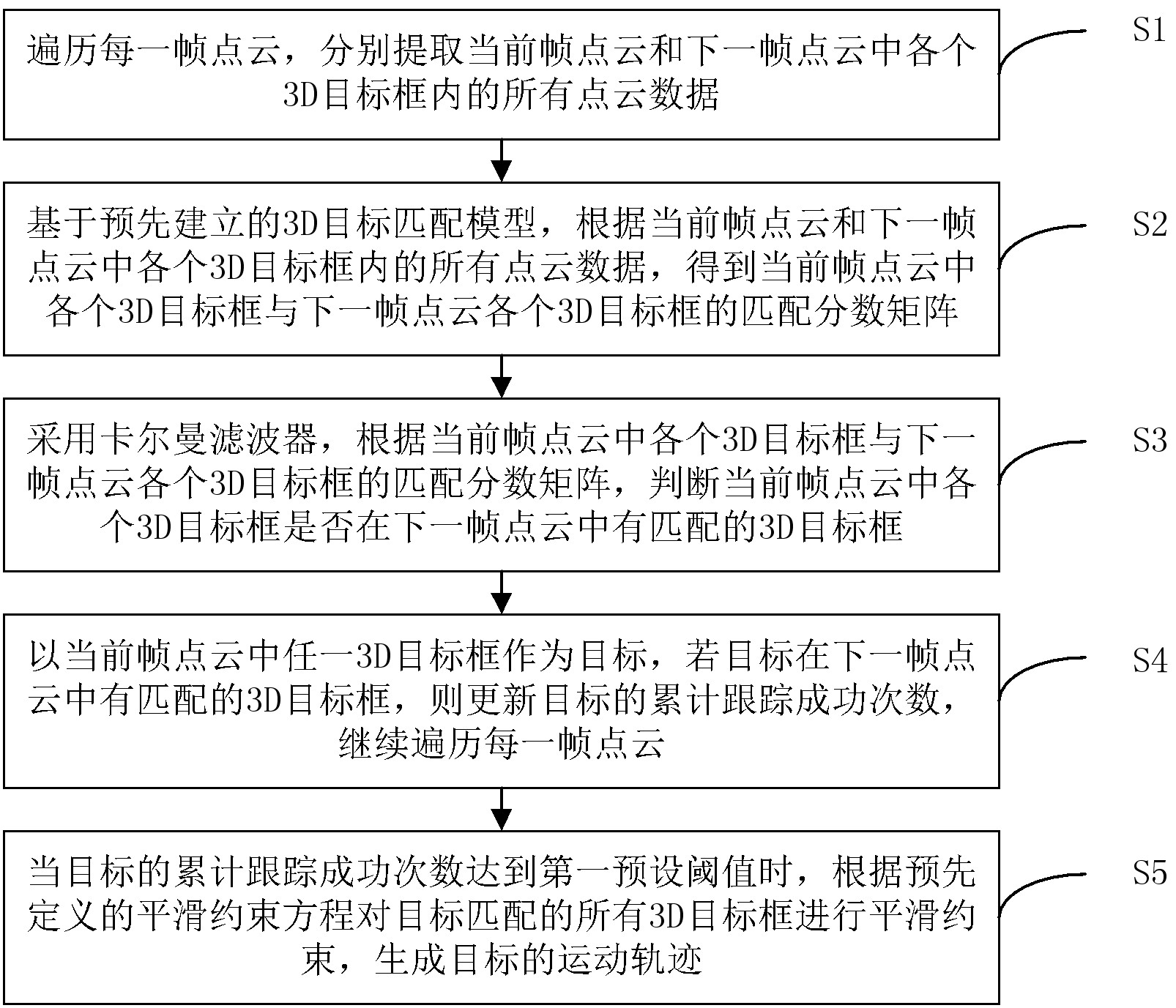
本发明公开了一种3D目标跟踪方法及装置。本发明通过利用预先建立的3D目标匹配模型预测相邻两帧点云中各个3D目标框的匹配分数,能够快速准确地关联前后帧点云中的3D目标框,通过结合卡尔曼滤波器不断确定当前帧点云中任一3D目标框,即目标在下一帧点云中匹配的3D目标框,并根据预先定义的平滑约束方程对目标匹配的所有3D目标框进行平滑约束,确定平滑约束后的这些3D目标框的位置生成目标的运动轨迹,能够有效保证目标的运动轨迹平滑可靠,从而实现高效、准确、稳定地关联前后帧点云中的3D目标框进行3D目标跟踪。
 chinappkf
客服微信号
chinappkf
客服微信号
 chinappsw
商务合作
chinappsw
商务合作
 品牌风云榜
关注公众号
品牌风云榜
关注公众号
CopyRight 2005-2026 品牌网 chinapp.com 版权所有