

授权公布号:CN111169468B
一种自动泊车的系统及方法
有效
申请
2018-11-12
申请公布
2020-05-19
授权
2023-10-27
预估到期
2038-11-12
| 申请号 | CN201811336760.4 |
| 申请日 | 2018-11-12 |
| 申请公布号 | CN111169468A |
| 申请公布日 | 2020-05-19 |
| 授权公布号 | CN111169468B |
| 授权公告日 | 2023-10-27 |
| 分类号 | B60W30/06;G06V20/58 |
| 分类 | 一般车辆; |
| 申请人名称 | 北京魔门塔科技有限公司 |
| 申请人地址 | 北京市海淀区中关村东路8号东升大厦AB座501单元 |
专利法律状态
2023-10-27
授权
状态信息
授权
2022-03-15
专利申请权、专利权的转移
状态信息
专利申请权的转移;IPC(主分类):B60W30/06;登记生效日:20220302;变更事项:申请人;变更前:北京初速度科技有限公司;变更后:北京魔门塔科技有限公司;变更事项:地址;变更前:100089 北京市海淀区中关村东路8号东升大厦A座4层28室;变更后:100083 北京市海淀区中关村东路8号东升大厦AB座501单元
2020-06-12
实质审查的生效
状态信息
实质审查的生效;IPC(主分类):B60W30/06;申请日:20181112
2020-05-19
公布
状态信息
公布
摘要
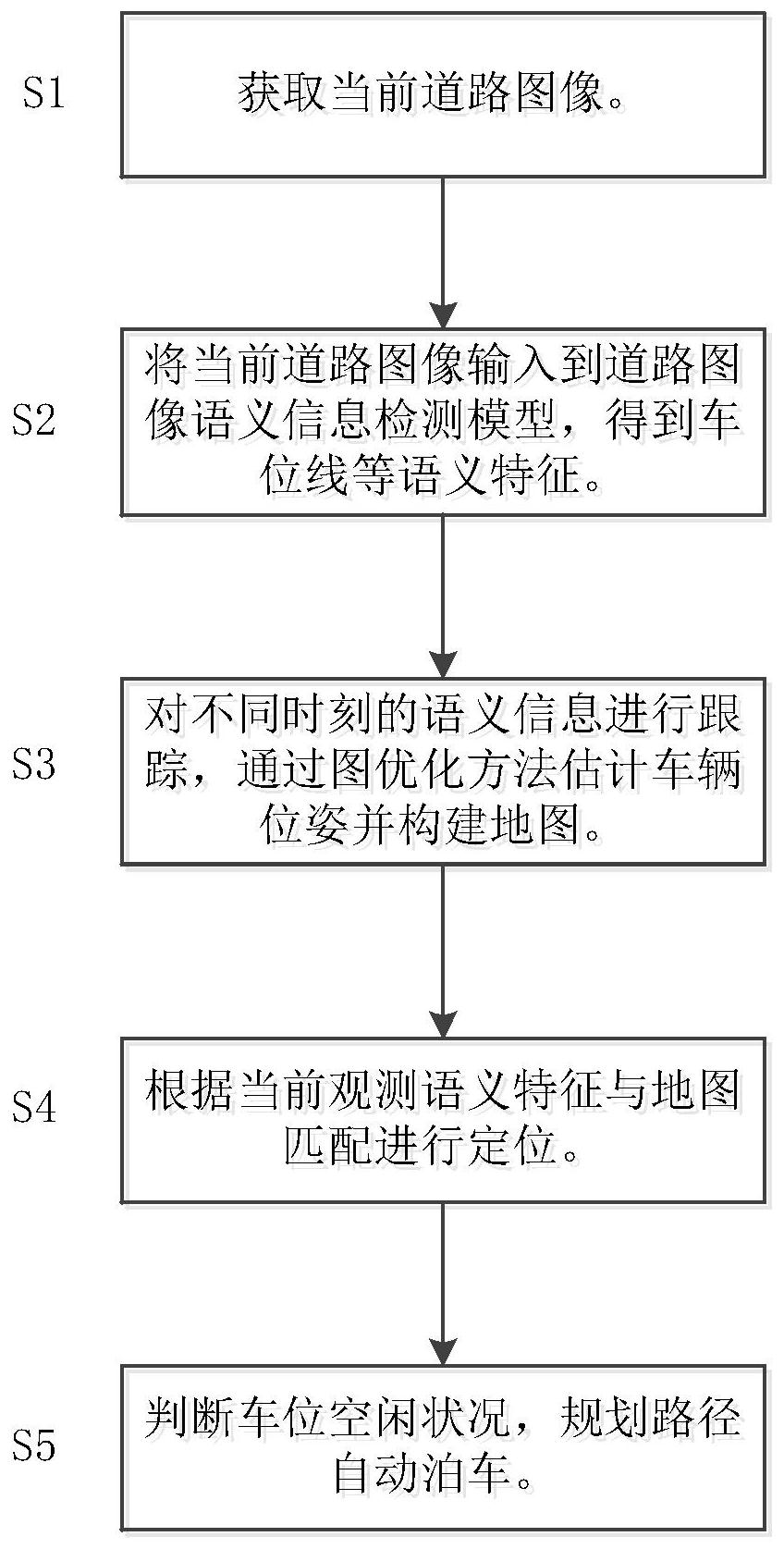
本发明涉及一种智能驾驶领域,具体涉及一种自动停车系统及自动停车方法。其通过待检测图像输入到所述道路图像模型中,得到道路图像的语义信息,并根据其中的语义特征进行实时地图构建及高精度定位。同时利用视觉信息及超声波进行空白车位检测,依托高精度定位技术对车辆泊车路径进行精确控制,完成泊车过程。此外,为了进一步实用定位高精度,采用在同一时刻拍摄到的多张目标图像,以得到俯视拼接图的方法。并识别俯视拼接图中的图像语义特征;基于所述图像语义特征和轮速计进行定位。该方法采用环视拼接图的直接法并融合轮速计,在保证算法鲁棒性的同时能够有效提升定位精度。
 chinappkf
客服微信号
chinappkf
客服微信号
 chinappsw
商务合作
chinappsw
商务合作
 品牌风云榜
关注公众号
品牌风云榜
关注公众号
CopyRight 2005-2026 品牌网 chinapp.com 版权所有