

授权公布号:CN110969664B
一种相机外部参数的动态标定方法
有效
申请
2018-09-30
申请公布
2020-04-07
授权
2023-10-24
预估到期
2038-09-30
| 申请号 | CN201811154031.7 |
| 申请日 | 2018-09-30 |
| 申请公布号 | CN110969664A |
| 申请公布日 | 2020-04-07 |
| 授权公布号 | CN110969664B |
| 授权公告日 | 2023-10-24 |
| 分类号 | G06T7/80 |
| 分类 | 计算;推算;计数; |
| 申请人名称 | 北京魔门塔科技有限公司 |
| 申请人地址 | 北京市海淀区中关村东路8号东升大厦AB座501单元 |
专利法律状态
2023-10-24
授权
状态信息
授权
2020-04-07
公布
状态信息
公布
摘要
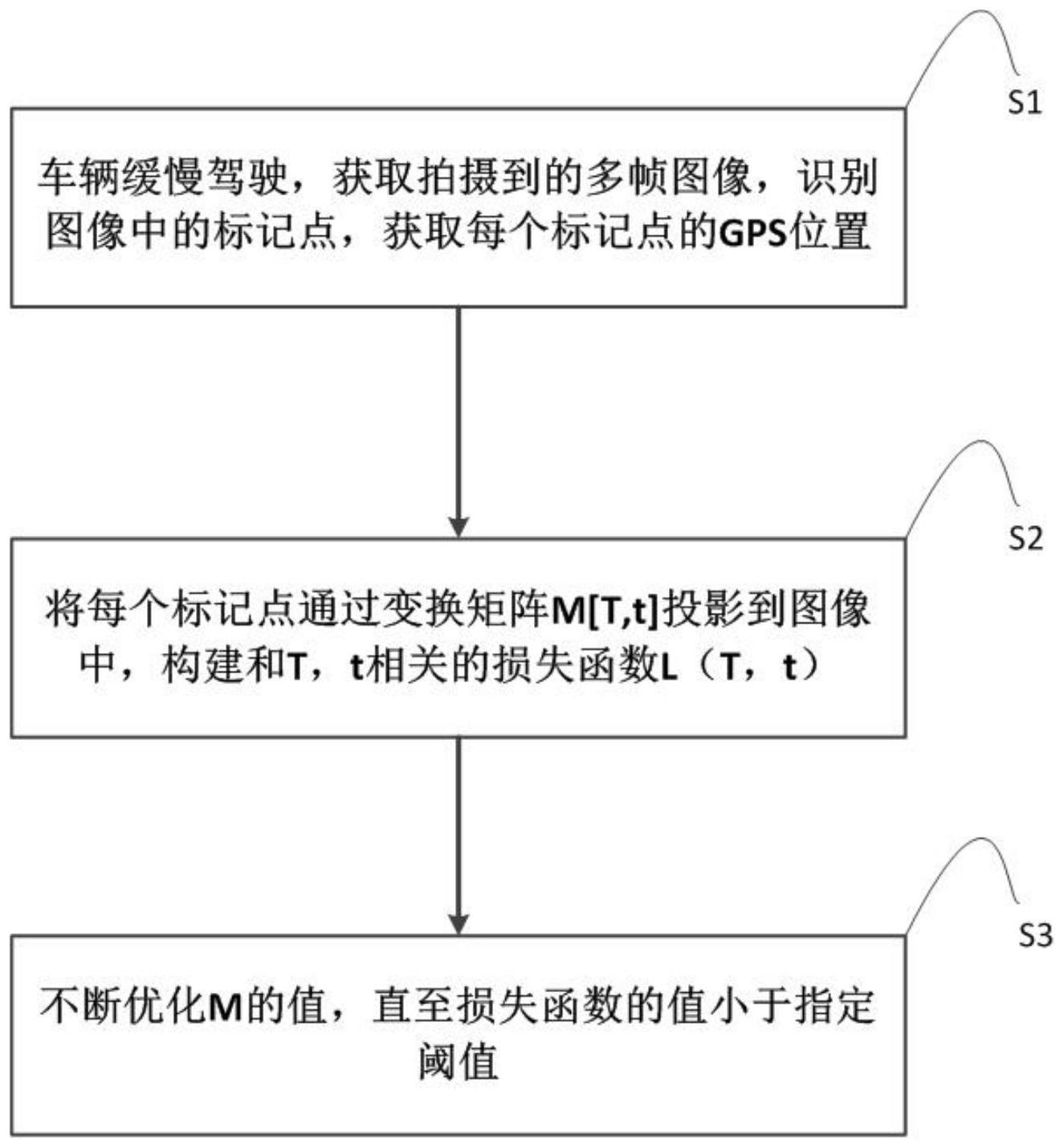
一种相机外部参数的动态标定方法;包括步骤S1:在车辆缓慢行驶过程中,设定一个或多个标记点,并获取相应的GPS的位置;步骤S2:通过变换矩阵M[T|t]将所述一个或多个标记点投影到所述车辆摄像装置所获取的图像中,得到所述一个或多个标记点在所述图像上的理论投影坐标;步骤S3:构建和T、t相关的损失函数,计算误差。通过摄像装置中的标记点的坐标观测值和通过一系列变换得到的坐标估计值之间,构建旋转平移变换矩阵T、时间延迟t相关的损失函数,可一次性完成T、t的标定。
 chinappkf
客服微信号
chinappkf
客服微信号
 chinappsw
商务合作
chinappsw
商务合作
 品牌风云榜
关注公众号
品牌风云榜
关注公众号
CopyRight 2005-2026 品牌网 chinapp.com 版权所有