

授权公布号:CN111860551B
一种多传感器数据融合方法及装置、车载终端
有效
申请
2019-04-27
申请公布
2020-10-30
授权
2024-02-06
预估到期
2039-04-27
| 申请号 | CN201910346798.8 |
| 申请日 | 2019-04-27 |
| 申请公布号 | CN111860551A |
| 申请公布日 | 2020-10-30 |
| 授权公布号 | CN111860551B |
| 授权公告日 | 2024-02-06 |
| 分类号 | G06F18/25;G06F16/901 |
| 分类 | 计算;推算;计数; |
| 申请人名称 | 北京魔门塔科技有限公司 |
| 申请人地址 | 北京市海淀区中关村东路8号东升大厦AB座501单元 |
专利法律状态
2024-02-06
授权
状态信息
授权
2022-03-15
专利申请权、专利权的转移
状态信息
专利申请权的转移;IPC(主分类):G06K9/62;登记生效日:20220303;变更事项:申请人;变更前:北京初速度科技有限公司;变更后:北京魔门塔科技有限公司;变更事项:地址;变更前:100089 北京市海淀区中关村东路8号东升大厦A座4层28室;变更后:100083 北京市海淀区中关村东路8号东升大厦AB座501单元
2020-11-17
实质审查的生效
状态信息
实质审查的生效;IPC(主分类):G06K9/62;申请日:20190427
2020-10-30
公布
状态信息
公布
摘要
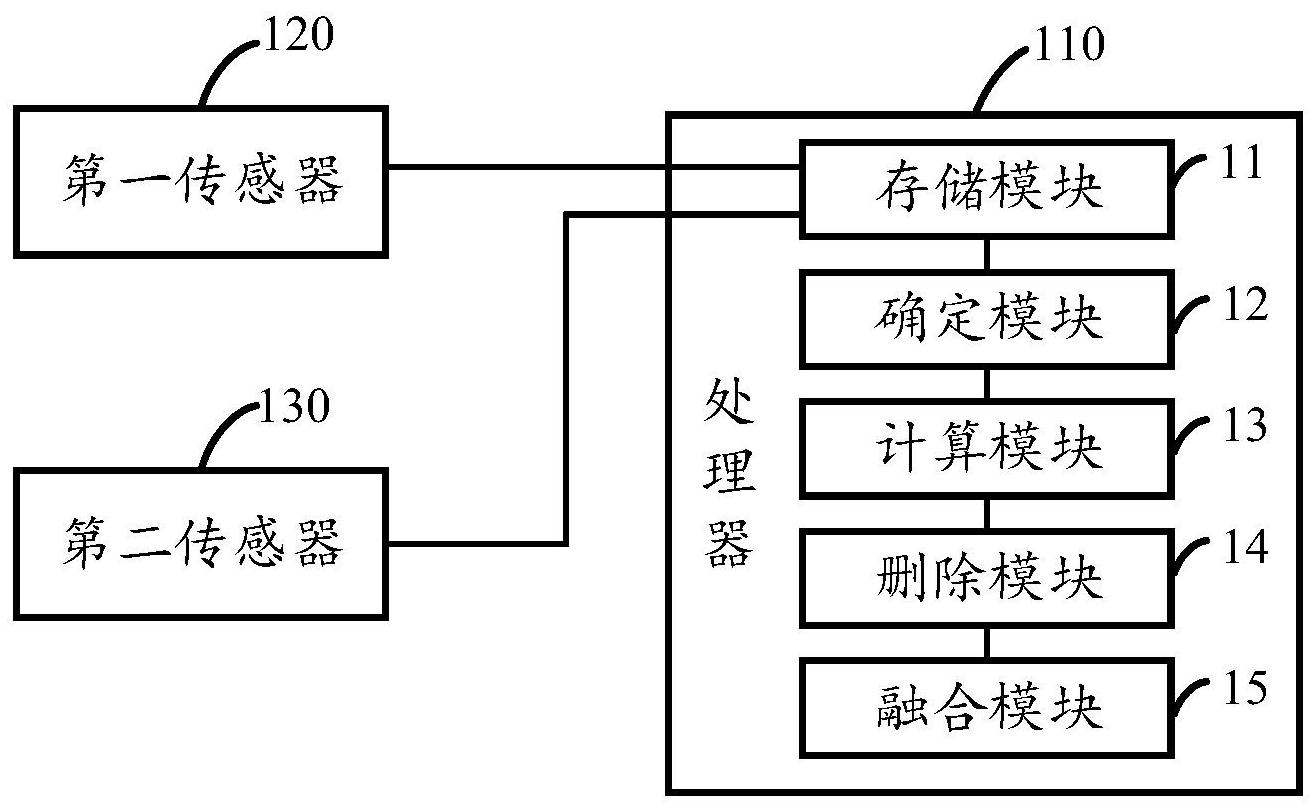
本发明实施例公开一种多传感器数据融合方法及装置、车载终端。该方法包括:确定存储空间中多个第一传感器数据中时刻最晚的第一时间戳;将第一时间戳减去预设的最大时延,得到早于第一时间戳的第二时间戳;从存储空间中删除时间戳早于第二时间戳的第一传感器数据和第二传感器数据;根据存储空间中剩余的第一传感器数据和第二传感器数据,进行数据融合;其中,在数据采集过程中,第一传感器和第二传感器在最大时延内均能采集到数据;第一传感器采集数据时的稳定性大于第二传感器采集数据时的稳定性。应用本发明实施例提供的方案,能够使得用于数据融合的各个传感器数据既具有时效性、数据全面,又能兼顾数据的稳定性。
 chinappkf
客服微信号
chinappkf
客服微信号
 chinappsw
商务合作
chinappsw
商务合作
 品牌风云榜
关注公众号
品牌风云榜
关注公众号
CopyRight 2005-2026 品牌网 chinapp.com 版权所有