

授权公布号:CN112444266B
一种参数的标定方法及装置
有效
申请
2019-08-27
申请公布
2021-03-05
授权
2023-04-14
预估到期
2039-08-27
| 申请号 | CN201910796147.9 |
| 申请日 | 2019-08-27 |
| 申请公布号 | CN112444266A |
| 申请公布日 | 2021-03-05 |
| 授权公布号 | CN112444266B |
| 授权公告日 | 2023-04-14 |
| 分类号 | G01C25/00ICN109490855A,2019.03.19;CN109188422A,2019.01.11;CN106137209A,2016.11.23;CN108139212A,2018.06.08;US7796470B1,2010.09.14;JP2004150973A,2004.05.27;CN109927717A,2019.06.25;CN107993257A,2018.05.04XiaorongWang等.AnalysisofFieldErrorsforLARPNb3SnHQ03Qua |
| 分类 | 测量;测试; |
| 申请人名称 | 北京魔门塔科技有限公司 |
| 申请人地址 | 北京市海淀区中关村东路8号东升大厦AB座501单元 |
专利法律状态
2023-04-14
授权
状态信息
授权
2022-03-15
专利申请权、专利权的转移
状态信息
专利申请权的转移;IPC(主分类):G01C 25/00;专利申请号:2019107961479;登记生效日:20220303;变更事项:申请人;变更前权利人:北京初速度科技有限公司;变更后权利人:北京魔门塔科技有限公司;变更事项:地址;变更前权利人:100083 北京市海淀区中关村东路8号东升大厦A座4层28室;变更后权利人:100083 北京市海淀区中关村东路8号东升大厦AB座501单元
2021-03-23
实质审查的生效
状态信息
实质审查的生效;IPC(主分类):G01C 25/00;专利申请号:2019107961479;申请日:20190827
2021-03-05
公布
状态信息
公布
摘要
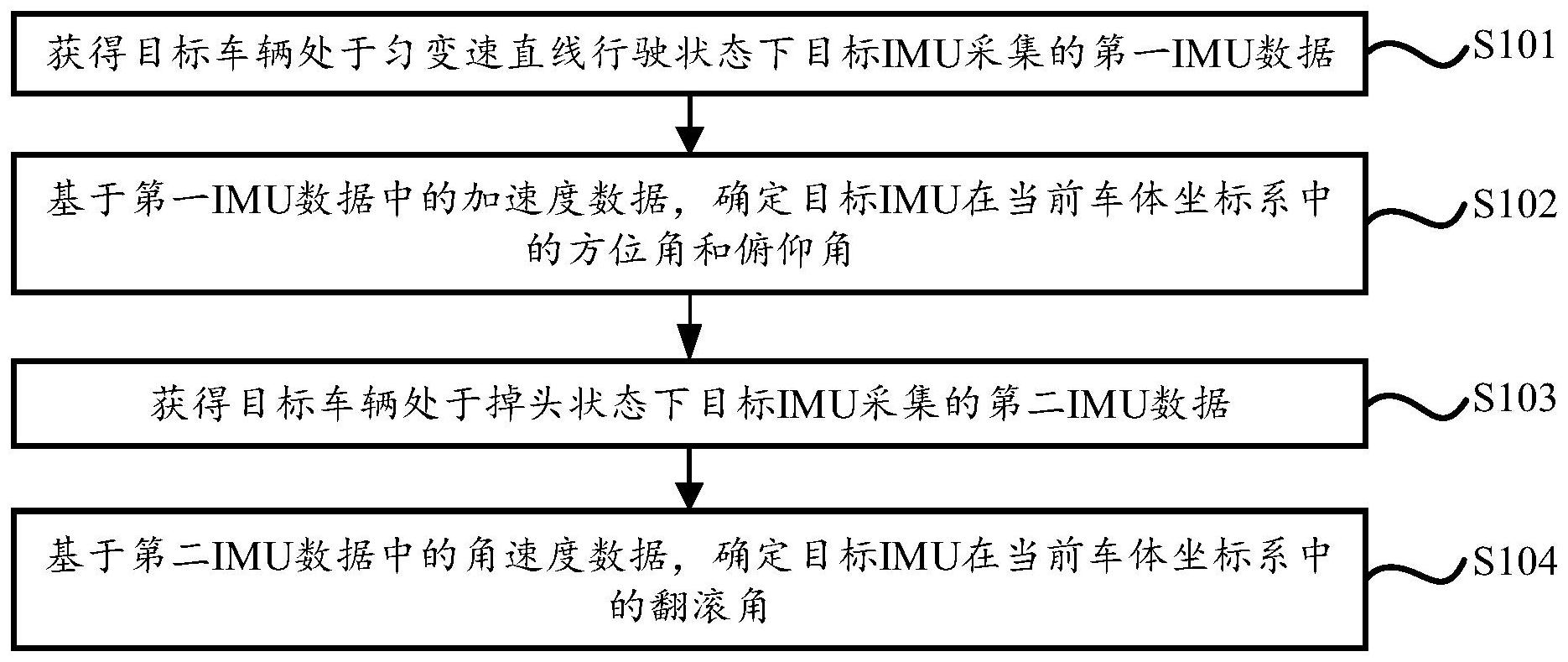
本发明实施例公开一种参数的标定方法及装置,该方法包括:获得目标车辆处于匀变速直线行驶状态下目标IMU采集的第一IMU数据,其中,目标IMU设置于目标车辆;基于第一IMU数据中的加速度数据,确定目标IMU在当前车体坐标系中的方位角和俯仰角,其中,当前车体坐标系为:在第一IMU数据对应的采集时刻目标车辆对应的车体坐标系;获得目标车辆处于掉头状态下目标IMU采集的第二IMU数据;基于第二IMU数据中的角速度数据,确定目标IMU在当前车体坐标系中的翻滚角,以实现自动标定得到IMU在车体坐标系下的安装角。
 chinappkf
客服微信号
chinappkf
客服微信号
 chinappsw
商务合作
chinappsw
商务合作
 品牌风云榜
关注公众号
品牌风云榜
关注公众号
CopyRight 2005-2026 品牌网 chinapp.com 版权所有