

授权公布号:CN113223064B
一种视觉惯性里程计尺度的估计方法和装置
有效
申请
2020-01-21
申请公布
2021-08-06
授权
2023-09-15
预估到期
2040-01-21
| 申请号 | CN202010069343.9 |
| 申请日 | 2020-01-21 |
| 申请公布号 | CN113223064A |
| 申请公布日 | 2021-08-06 |
| 授权公布号 | CN113223064B |
| 授权公告日 | 2023-09-15 |
| 分类号 | G06T7/33;G06T7/73;G06T7/55;G01C22/00 |
| 分类 | 计算;推算;计数; |
| 申请人名称 | 北京魔门塔科技有限公司 |
| 申请人地址 | 北京市海淀区中关村东路8号东升大厦AB座501单元 |
专利法律状态
2023-09-15
授权
状态信息
授权
2022-03-15
专利申请权、专利权的转移
状态信息
专利申请权的转移;IPC(主分类):G06T7/33;登记生效日:20220303;变更事项:申请人;变更前:北京初速度科技有限公司;变更后:北京魔门塔科技有限公司;变更事项:地址;变更前:100083 北京市海淀区中关村东路8号东升大厦A座4层28室;变更后:100083 北京市海淀区中关村东路8号东升大厦AB座501单元
2021-08-24
实质审查的生效
状态信息
实质审查的生效;IPC(主分类):G06T7/33;申请日:20200121
2021-08-06
公布
状态信息
公布
摘要
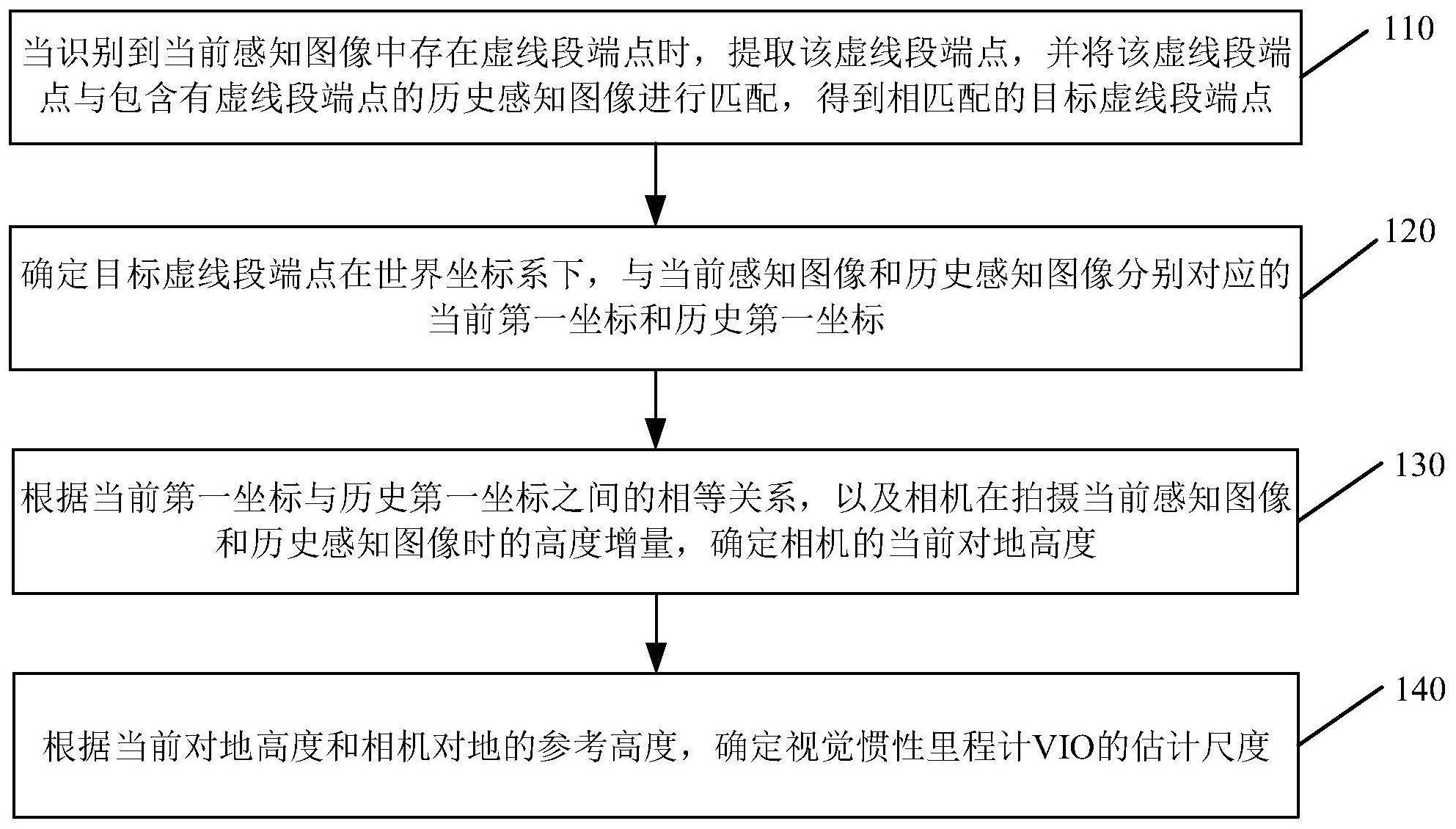
本发明实施例公开了一种视觉惯性里程计尺度的估计方法和装置,该方法包括:当识别到当前感知图像中存在虚线段端点时,提取该虚线段端点,并将该虚线段端点与包含有虚线段端点的历史感知图像进行匹配,得到相匹配的目标虚线段端点;确定目标虚线段端点在世界坐标系下,与当前感知图像和历史感知图像分别对应的当前第一坐标和历史第一坐标;根据所述当前第一坐标与历史第一坐标之间的相等关系,以及相机在拍摄当前感知图像和历史感知图像时的高度增量,确定相机的当前对地高度;根据所述当前对地高度和相机对地的参考高度,确定视觉惯性里程计VIO的估计尺度。通过采用上述技术方案,在GPS信号受到干扰或影响时,可准确估计出VIO的尺度。
 chinappkf
客服微信号
chinappkf
客服微信号
 chinappsw
商务合作
chinappsw
商务合作
 品牌风云榜
关注公众号
品牌风云榜
关注公众号
CopyRight 2005-2026 品牌网 chinapp.com 版权所有