

授权公布号:CN111179162B
一种特殊环境下的定位初始化方法及车载终端
有效
申请
2018-11-12
申请公布
2020-05-19
授权
2023-10-24
预估到期
2038-11-12
| 申请号 | CN201811336757.2 |
| 申请日 | 2018-11-12 |
| 申请公布号 | CN111179162A |
| 申请公布日 | 2020-05-19 |
| 授权公布号 | CN111179162B |
| 授权公告日 | 2023-10-24 |
| 分类号 | G06T3/40;G01C21/00 |
| 分类 | 计算;推算;计数; |
| 申请人名称 | 北京魔门塔科技有限公司 |
| 申请人地址 | 北京市海淀区中关村东路8号东升大厦AB座501单元 |
专利法律状态
2023-10-24
授权
状态信息
授权
2020-05-19
公布
状态信息
公布
摘要
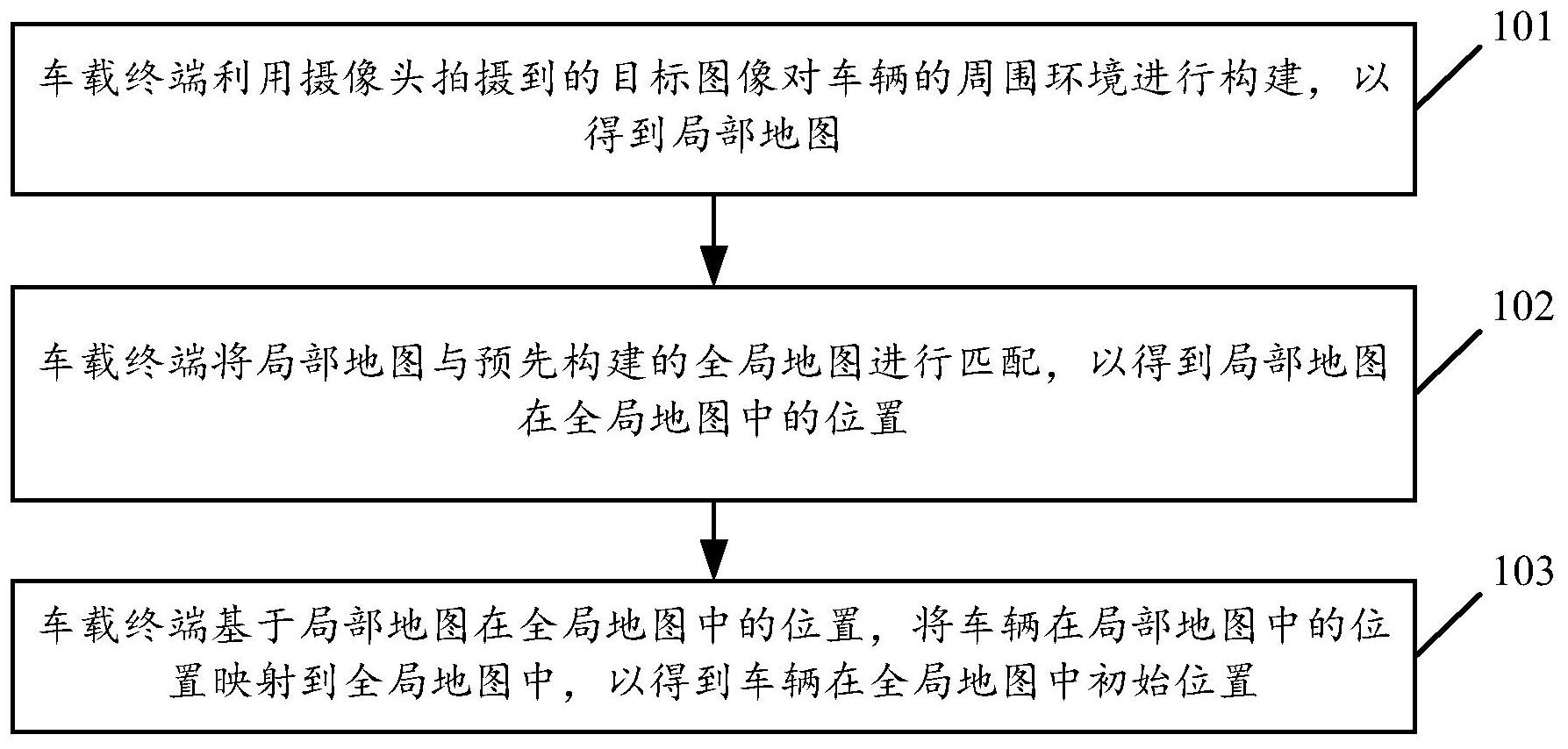
一种特殊环境下的定位初始化方法及车载终端,该方法包括:利用图像采集装置拍摄到的目标图像对车辆的周围环境进行构建得到局部地图;将所述局部地图与预先构建的全局地图进行匹配,以得到所述局部地图在所述全局地图中的位置;基于所述局部地图在所述全局地图中的位置,将所述车辆在所述局部地图中的位置映射到所述全局地图中,以得到所述车辆在所述全局地图中初始位置。此外,针对多张目标图像进行拼接识别所述俯视拼接图中的图像语义特征,以得到所述俯视感知图;基于所述俯视感知图进行定位,从而确定关键帧;根据所述关键帧生成地图点,从而形成局部地图。实施本发明实施例,可以在GPS信号等位置先验信息缺失的情况下,利用图像采集装置拍摄到的图像数据确定出车辆在全局地图中的初始位置。通过关键帧生成地图点形成的局部地图,能够建出稠密而准确的地库地面元素,并且更为鲁棒,精确。
 chinappkf
客服微信号
chinappkf
客服微信号
 chinappsw
商务合作
chinappsw
商务合作
 品牌风云榜
关注公众号
品牌风云榜
关注公众号
CopyRight 2005-2026 品牌网 chinapp.com 版权所有