

授权公布号:CN112150547B
一种确定车体位姿的方法、装置及环视视觉里程计系统
有效
申请
2019-06-28
申请公布
2020-12-29
授权
2024-03-12
预估到期
2039-06-28
| 申请号 | CN201910575005.X |
| 申请日 | 2019-06-28 |
| 申请公布号 | CN112150547A |
| 申请公布日 | 2020-12-29 |
| 授权公布号 | CN112150547B |
| 授权公告日 | 2024-03-12 |
| 分类号 | G06T7/73;G06T7/246;G06T7/80;G06V20/58 |
| 分类 | 计算;推算;计数; |
| 申请人名称 | 北京魔门塔科技有限公司 |
| 申请人地址 | 北京市海淀区中关村东路8号东升大厦AB座501单元 |
专利法律状态
2024-03-12
授权
状态信息
授权
2022-03-15
专利申请权、专利权的转移
状态信息
专利申请权的转移;IPC(主分类):G06T7/73;登记生效日:20220303;变更事项:申请人;变更前:北京初速度科技有限公司;变更后:北京魔门塔科技有限公司;变更事项:地址;变更前:100083 北京市海淀区中关村东路8号东升大厦A座4层28室;变更后:100083 北京市海淀区中关村东路8号东升大厦AB座501单元
2021-01-15
实质审查的生效
状态信息
实质审查的生效;IPC(主分类):G06T7/73;申请日:20190628
2020-12-29
公布
状态信息
公布
摘要
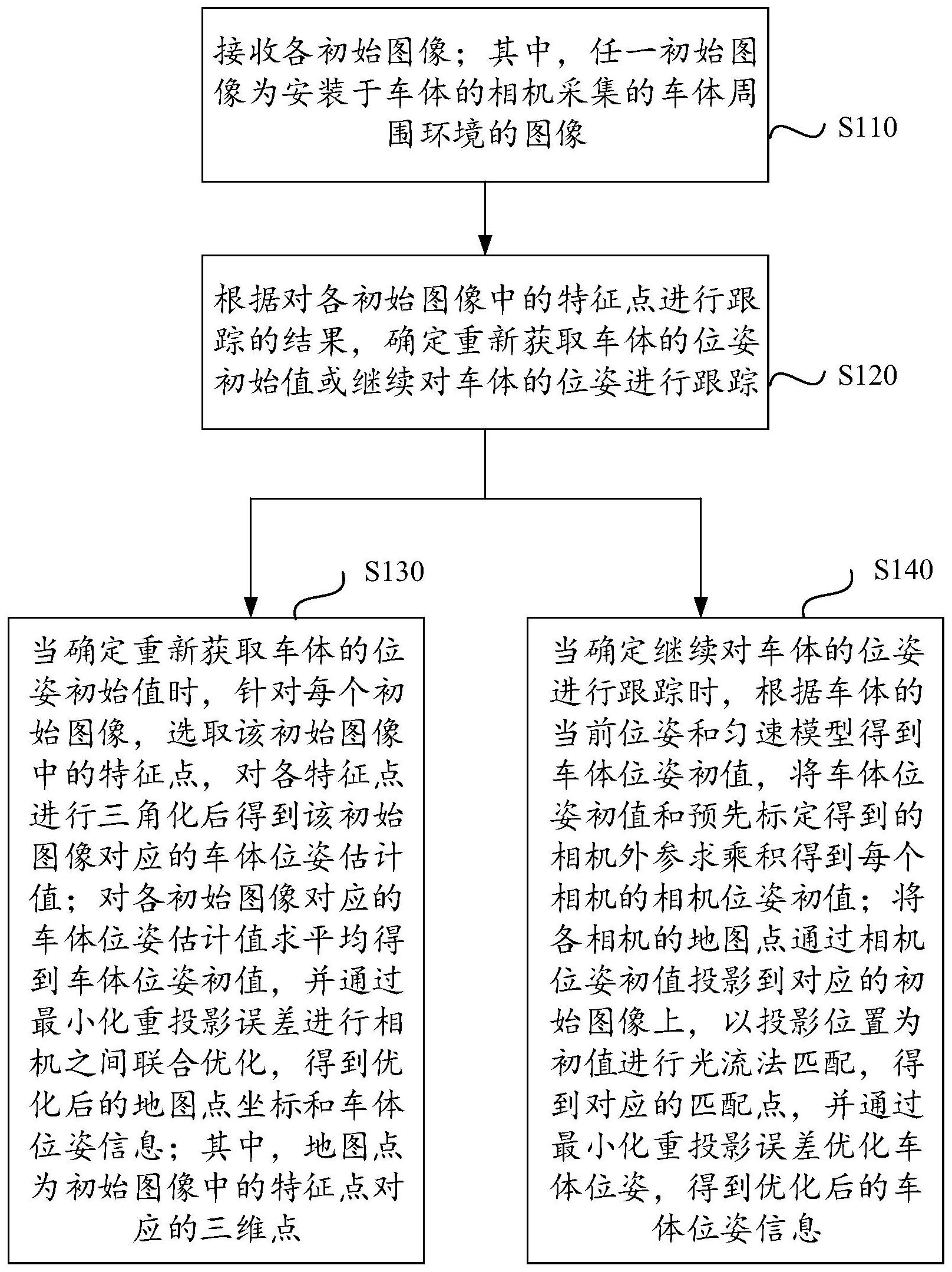
本发明实施例公开一种确定车体位姿的方法、装置及环视视觉里程计系统。该方法包括:接收各初始图像;当确定重新获取车体的位姿初始值时,针对每个初始图像,选取该初始图像中的特征点,对各特征点进行三角化后得到该初始图像对应的车体位姿估计值;计算车体位姿初值,并通过最小化重投影误差得到优化后的地图点坐标和车体位姿信息;当确定继续对车体的位姿进行跟踪时,计算每个相机的相机位姿初值;将各相机的地图点通过相机位姿初值投影到对应的初始图像上,以投影位置为初值进行光流法匹配,得到对应的匹配点,并通过最小化重投影误差优化车体位姿,得到优化后的车体位姿信息。应用本发明实施例提供的方案,能够提高车辆定位的适用性。
 chinappkf
客服微信号
chinappkf
客服微信号
 chinappsw
商务合作
chinappsw
商务合作
 品牌风云榜
关注公众号
品牌风云榜
关注公众号
CopyRight 2005-2026 品牌网 chinapp.com 版权所有