

授权公布号:CN109017449B
一种纯电动车的驱动防滑控制方法及系统
失效
申请
2018-08-17
申请公布
2018-12-18
授权
2021-05-07
预估到期
2038-08-17
| 申请号 | CN201810943271.9 |
| 申请日 | 2018-08-17 |
| 申请公布号 | CN109017449A |
| 申请公布日 | 2018-12-18 |
| 授权公布号 | CN109017449B |
| 授权公告日 | 2021-05-07 |
| 分类号 | B60L15/20 |
| 分类 | 一般车辆; |
| 申请人名称 | 南京越博动力系统股份有限公司 |
| 申请人地址 | 江苏省南京市建邺区嘉陵江东街18号4栋410 |
专利法律状态
2023-08-25
专利权的终止
状态信息
未缴年费专利权终止;IPC(主分类):B60L 15/20;专利号:ZL2018109432719;申请日:20180817;授权公告日:20210507;终止日期:
2021-05-07
授权
状态信息
授权
2019-01-11
实质审查的生效
状态信息
实质审查的生效;IPC(主分类):B60L 15/20;专利申请号:2018109432719;申请日:20180817
2018-12-18
发明专利申请公布
状态信息
公布
摘要
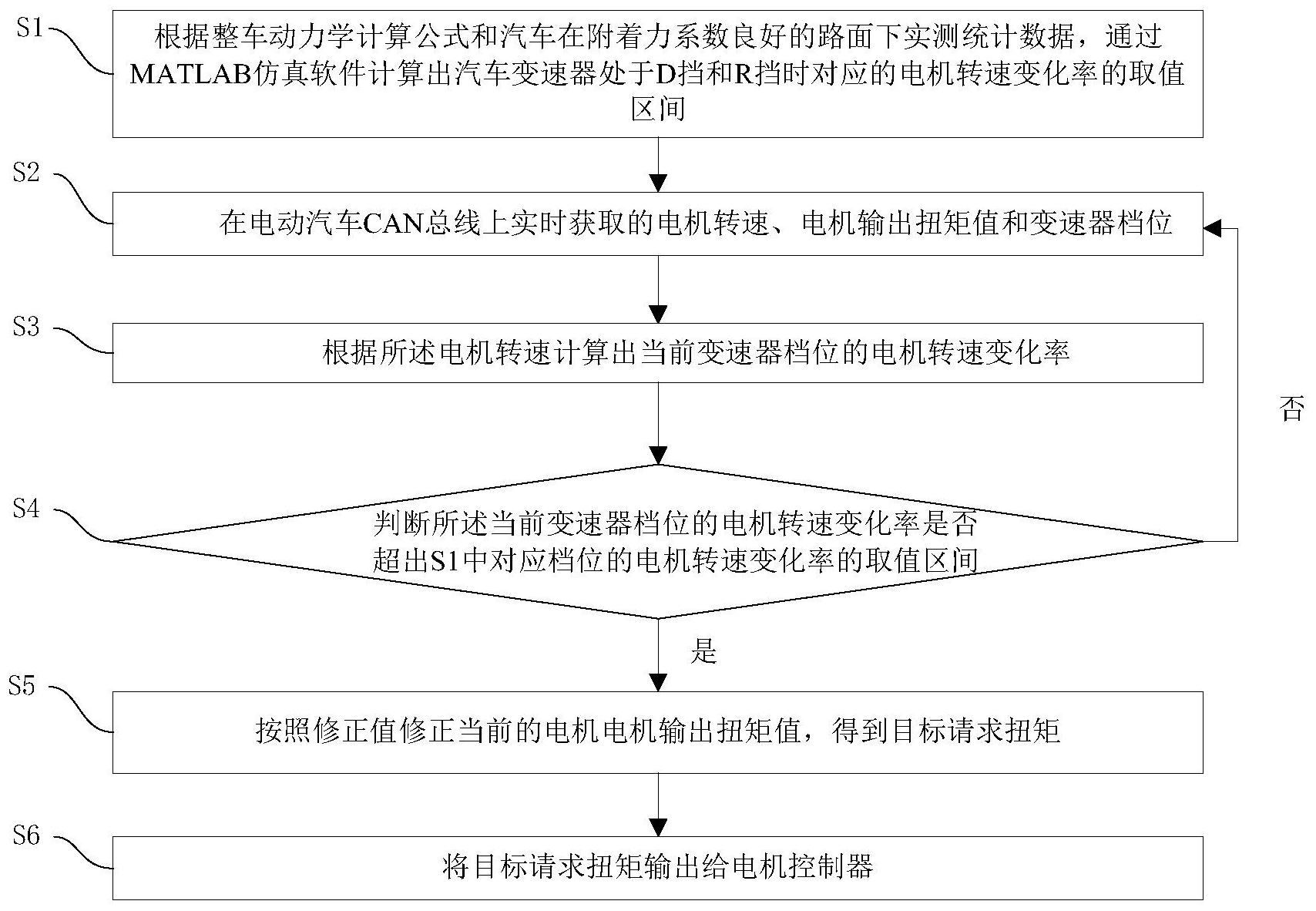
本发明属于电动汽车电驱动控制领域,具体涉及一种纯电动车的驱动防滑控制方法及系统;所述方法包括:通过MATLAB仿真软件计算出汽车变速器处于D挡和R挡时对应的电机转速变化率的取值区间,根据电机的实时转速计算出当前变速器档位的电机转速变化率,并通过判断所述电机转速变化率是否超出对应档位电机转速变化率的取值区间,判定车辆是否处于打滑状态,当判定车辆处于打滑状态时,通过对驾驶员的请求扭矩值的修正,使车辆脱离打滑状态。本发明在未增加外部传感器和整车额外数据接口的情况下,提升了整车驱动力控制性能,同时易于集成在已有的整车控制系统中,具有较好的通用性。
 chinappkf
客服微信号
chinappkf
客服微信号
 chinappsw
商务合作
chinappsw
商务合作
 品牌风云榜
关注公众号
品牌风云榜
关注公众号
CopyRight 2005-2026 品牌网 chinapp.com 版权所有