

授权公布号:CN113379350B
一种无人驾驶投递车辆的停靠位置规划方法及系统
有效
申请
2021-06-11
申请公布
2021-09-10
授权
2024-01-23
预估到期
2041-06-11
| 申请号 | CN202110651937.5 |
| 申请日 | 2021-06-11 |
| 申请公布号 | CN113379350A |
| 申请公布日 | 2021-09-10 |
| 授权公布号 | CN113379350B |
| 授权公告日 | 2024-01-23 |
| 分类号 | G06Q10/083;G06Q10/047;G06N3/08;CN110910075A,2020.03.24;CN108305139A,2018.07.20;CN112419779A,2021.02.26;CN112622933A,2021.04.09;JP2019149116A,2019.09.05;US9792576B1,2017.10.17;CN109709943A,2019.05.03;CN109205157A,2019.01.15;CN110046857A,2019.07.23;CN109974 |
| 分类 | 计算;推算;计数; |
| 申请人名称 | 郑州时空隧道信息技术有限公司 |
| 申请人地址 | 河南省郑州市福彩路10号都市家园3号楼4单元3楼西户 |
专利法律状态
2024-01-23
授权
状态信息
授权
2021-09-28
实质审查的生效
状态信息
实质审查的生效;IPC(主分类):G06Q10/08;申请日:20210611
2021-09-10
公布
状态信息
公布
摘要
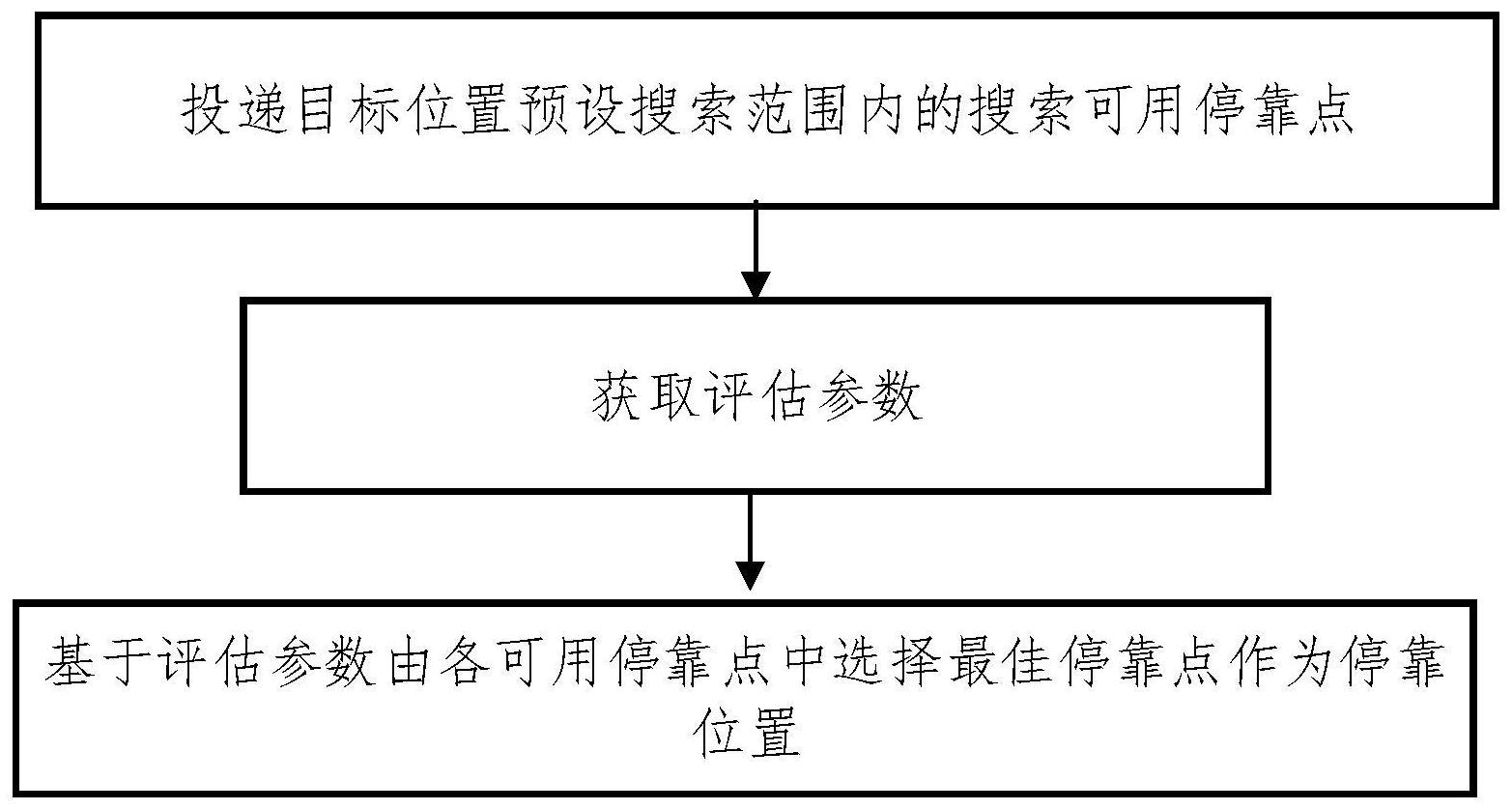
本发明涉及一种无人驾驶投递车辆的停靠位置规划方法及系统,投递目标位置预设搜索范围内的搜索可用停靠点;获取评估参数,包括:各可用停靠点的停靠次数、与投递目标位置的关联次数、停靠耗时均值、出发位置至各可用停靠点所需时长、投递目标位置与停靠点的步行通行距离;基于评估参数由各可用停靠点中选择最佳停靠点作为停靠位置。该方式综合考虑路线因素、停靠点本身因素、用户使用习惯,选择最佳停靠点,保证了用户满意度以及投递效率。
 chinappkf
客服微信号
chinappkf
客服微信号
 chinappsw
商务合作
chinappsw
商务合作
 品牌风云榜
关注公众号
品牌风云榜
关注公众号
CopyRight 2005-2026 品牌网 chinapp.com 版权所有