

授权公布号:CN115744643B
一种自动化双梁桥式机械手起重机及其使用方法
有效
申请
2022-09-27
申请公布
2023-03-07
授权
2023-05-30
预估到期
2042-09-27
| 申请号 | CN202211180041.4 |
| 申请日 | 2022-09-27 |
| 申请公布号 | CN115744643A |
| 申请公布日 | 2023-03-07 |
| 授权公布号 | CN115744643B |
| 授权公告日 | 2023-05-30 |
| 分类号 | B66C17/12;B66C11/00;B66C9/14;B66C1/34;B66C1/36 |
| 分类 | 卷扬;提升;牵引; |
| 申请人名称 | 山东德鲁克起重机集团有限公司 |
| 申请人地址 | 山东省泰安市新泰市羊流工业园区 |
专利法律状态
2023-05-30
授权
状态信息
授权
2023-03-24
实质审查的生效
状态信息
实质审查的生效;IPC(主分类):B66C 17/12;专利申请号:2022111800414;申请日:20220927
2023-03-07
公布
状态信息
公布
摘要
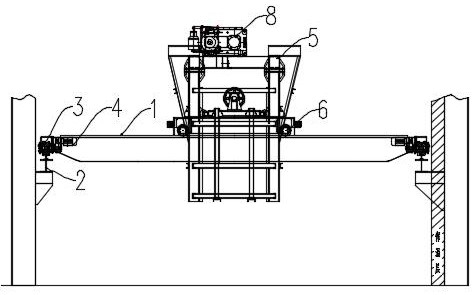
本发明涉及一种自动化双梁桥式机械手起重机及其使用方法,包括纵向移动的行走行车、在行走行车上横向移动的横移小车以及竖向滑接在横移小车上的升降架,升降架上竖向滑接有上夹紧架,所述升降架下端固接有位于上夹紧架下方的下夹紧架,所述下夹紧架的一侧与升降架固接,所述横移小车上装有驱动升降架升降的升降驱动,所述升降架上装有驱动上夹紧架升降的夹紧驱动,本发明的升降架在车间内实现纵向、横向和竖向的移动,从而实现工件的搬运,下夹紧架的一侧与升降架固接从而形成类似钩子的结构,从而将环形件勾起,通过两个下夹紧臂反向摆动实现工件的左右定位,然后通过夹紧驱动带动上夹紧架下移实现环形件的夹紧,防止移动运输过程中的晃动脱落。
 chinappkf
客服微信号
chinappkf
客服微信号
 chinappsw
商务合作
chinappsw
商务合作
 品牌风云榜
关注公众号
品牌风云榜
关注公众号
CopyRight 2005-2026 品牌网 chinapp.com 版权所有