

授权公布号:CN116899107B
智能随动减重治疗机械臂、控制方法及治疗支架
有效
申请
2023-06-21
申请公布
2023-10-20
授权
2024-02-13
预估到期
2043-06-21
| 申请号 | CN202310741990.3 |
| 申请日 | 2023-06-21 |
| 申请公布号 | CN116899107A |
| 申请公布日 | 2023-10-20 |
| 授权公布号 | CN116899107B |
| 授权公告日 | 2024-02-13 |
| 分类号 | A61N2/00;A61N2/02;A61B34/00 |
| 分类 | 医学或兽医学;卫生学; |
| 申请人名称 | 南京伟思医疗科技股份有限公司 |
| 申请人地址 | 江苏省南京市雨花台区宁双路19号云密城H栋 |
专利法律状态
2024-02-13
授权
状态信息
授权
2023-11-07
实质审查的生效
状态信息
实质审查的生效;IPC(主分类):A61N2/00;申请日:20230621
2023-10-20
公布
状态信息
公布
摘要
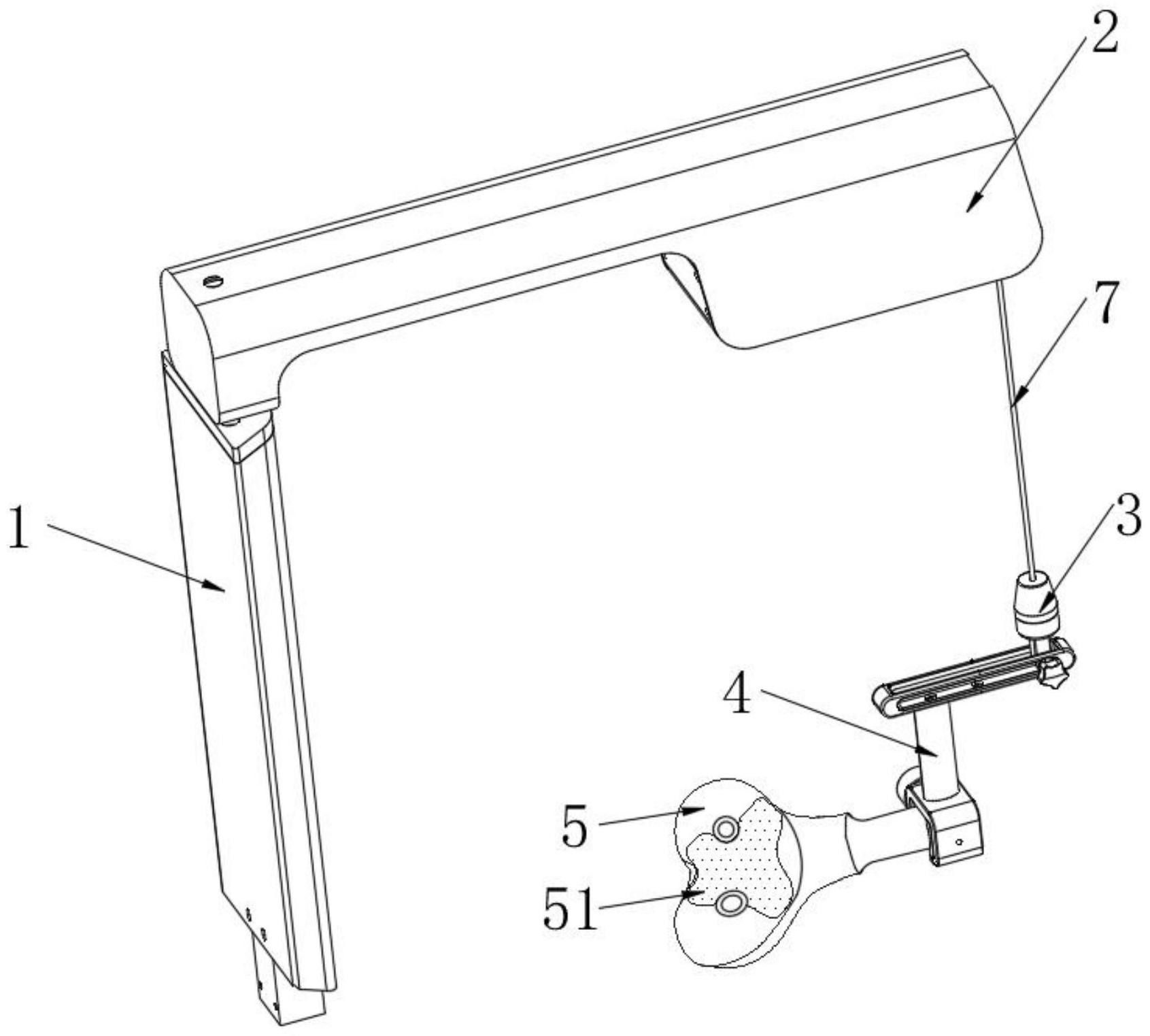
本发明提供智能随动减重治疗机械臂、控制方法及治疗支架,包括连接架,所述连接架的端部转动连接有横梁,且所述横梁的内部设有称重模组;所述称重模组包括收放件、力感应器和总控制板,所述总控制板与力感应器、收放件电连接;所述收放件连接吊绳,所述收放件用于收放吊绳;所述吊绳的另一端穿过力感应器与吊绳连接件连接,所述吊绳连接件连接拍头。本发明的机械臂通过设有的称重模组,在进行使用时,能够根据力感应器的检测情况调整使用者所受压力或者拉力,以实现减轻悬挂物的重量,提高使用者的舒适度;本发明的机械臂配合随动定位帽应用到经颅磁治疗支架时,能够在一定的范围内可以跟随使用者进行移动,保持跟随,实时有效针对靶点治疗。
 chinappkf
客服微信号
chinappkf
客服微信号
 chinappsw
商务合作
chinappsw
商务合作
 品牌风云榜
关注公众号
品牌风云榜
关注公众号
CopyRight 2005-2026 品牌网 chinapp.com 版权所有