

授权公布号:CN114347016B
一种多仓机器人控制方法及相关设备
有效
申请
2021-12-10
申请公布
2022-04-15
授权
2024-03-26
预估到期
2041-12-10
| 申请号 | CN202111507271.2 |
| 申请日 | 2021-12-10 |
| 申请公布号 | CN114347016A |
| 申请公布日 | 2022-04-15 |
| 授权公布号 | CN114347016B |
| 授权公告日 | 2024-03-26 |
| 分类号 | B25J9/16 |
| 分类 | 手动工具;轻便机动工具;手动器械的手柄;车间设备;机械手; |
| 申请人名称 | 北京云迹科技股份有限公司 |
| 申请人地址 | 北京市海淀区北四环西路67号7层702室 |
专利法律状态
2024-03-26
授权
状态信息
授权
2022-04-15
公布
状态信息
公布
摘要
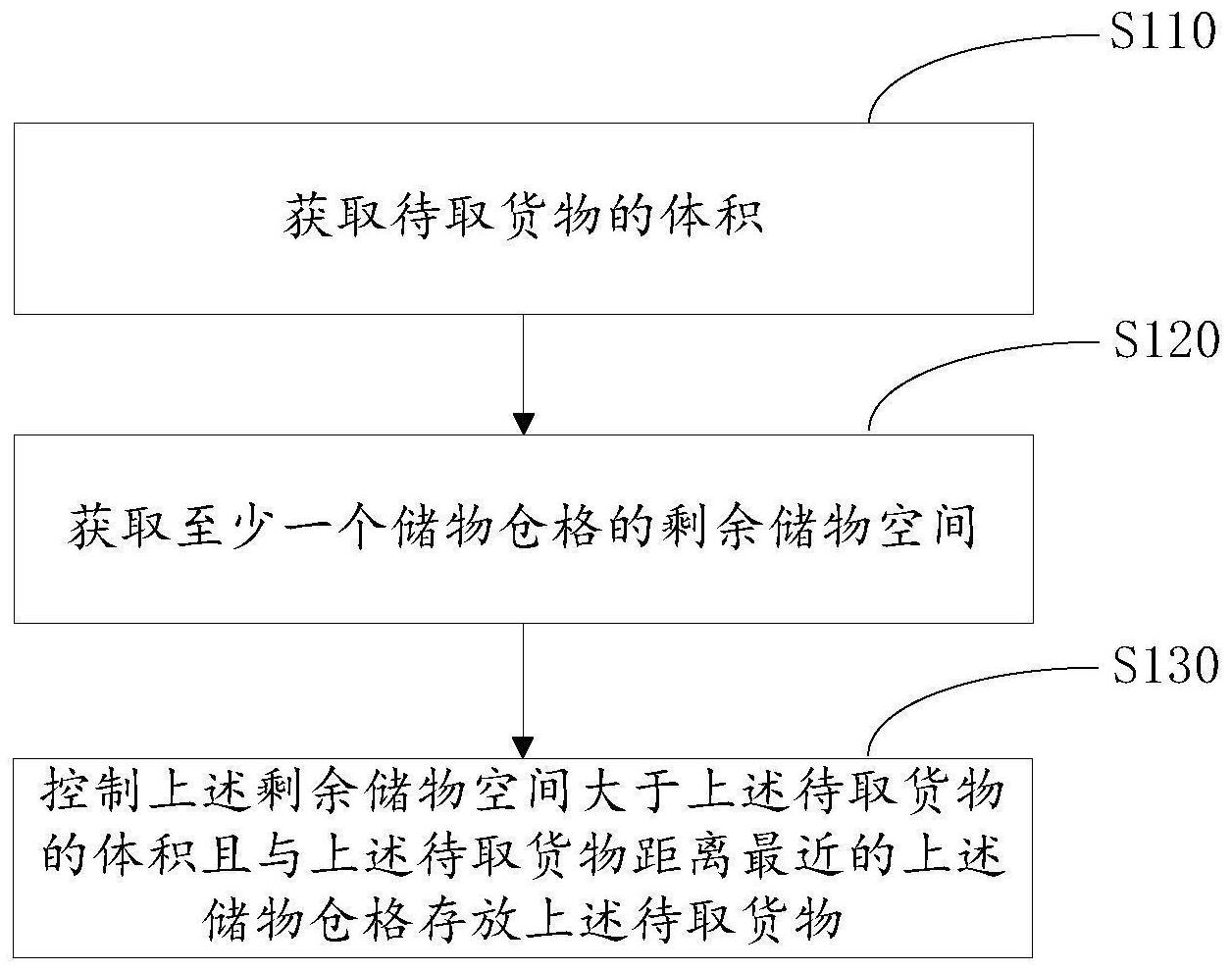
本发明公开了一种多仓机器人控制方法及相关设备。该方法包括:获取待取货物的体积并获取至少一个储物仓格的剩余储物空间,控制剩余储物空间大于待取货物的体积且与待取货物距离最近的储物仓格存放待取货物。本申请实施例本通过获取待取货物的体积与多仓机器人储物仓格的剩余体积,选取能够容纳待取货物并且距离待取货物最近的储物仓格存储上述待取货物。避免了储物仓格空间不足,造成无法存入货物现象的发生。同时,能够保证货物进入储物仓格的过程中移动路径最短,减少货物发生颠簸的可能,节省了配货时间,增大了配货的成功率。
 chinappkf
客服微信号
chinappkf
客服微信号
 chinappsw
商务合作
chinappsw
商务合作
 品牌风云榜
关注公众号
品牌风云榜
关注公众号
CopyRight 2005-2026 品牌网 chinapp.com 版权所有