

授权公布号:CN111984013B
基于机器人脚印数据的距离计算方法及装置
有效
申请
2020-08-21
申请公布
2020-11-24
授权
2024-03-19
预估到期
2040-08-21
| 申请号 | CN202010853596.5 |
| 申请日 | 2020-08-21 |
| 申请公布号 | CN111984013A |
| 申请公布日 | 2020-11-24 |
| 授权公布号 | CN111984013B |
| 授权公告日 | 2024-03-19 |
| 分类号 | G05D1/43;G05D1/622 |
| 分类 | 控制;调节; |
| 申请人名称 | 北京云迹科技股份有限公司 |
| 申请人地址 | 北京市海淀区北四环西路67号7层702室 |
专利法律状态
2024-03-19
授权
状态信息
授权
2022-03-18
著录事项变更
状态信息
著录事项变更;IPC(主分类):G05D1/02;变更事项:申请人;变更前:北京云迹科技有限公司;变更后:北京云迹科技股份有限公司;变更事项:地址;变更前:100089 北京市海淀区北四环西路67号7层702室;变更后:100089 北京市海淀区北四环西路67号7层702室
2020-12-11
实质审查的生效
状态信息
实质审查的生效;IPC(主分类):G05D1/02;申请日:20200821
2020-11-24
公布
状态信息
公布
摘要
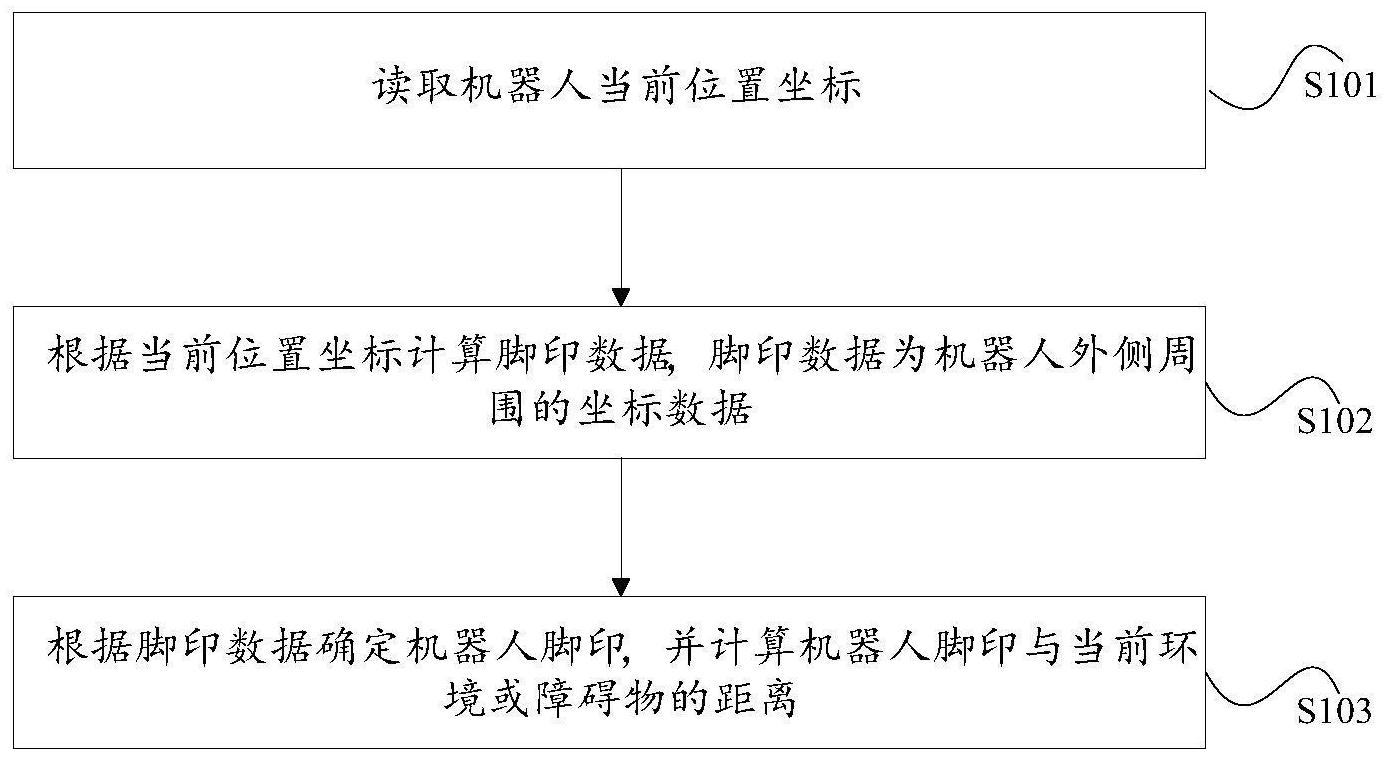
本申请公开了一种基于机器人脚印数据的距离计算方法及装置,本申请的方法包括读取机器人当前位置坐标;根据当前位置坐标计算脚印数据,所述脚印数据为机器人外侧周围的坐标数据;根据脚印数据确定机器人脚印,并计算机器人脚印与当前环境或障碍物的距离。本申请是为了提供一种更精准的判断机器人与其与周围环境或者障碍物的距离的方式,减少由于准确判断距离导致需要重新规划路线影响机器人正常行驶的发生概率。
 chinappkf
客服微信号
chinappkf
客服微信号
 chinappsw
商务合作
chinappsw
商务合作
 品牌风云榜
关注公众号
品牌风云榜
关注公众号
CopyRight 2005-2026 品牌网 chinapp.com 版权所有