

授权公布号:CN114216451B
一种机器人地图的更新方法及装置
有效
申请
2021-12-02
申请公布
2022-03-22
授权
2024-03-26
预估到期
2041-12-02
| 申请号 | CN202111461939.4 |
| 申请日 | 2021-12-02 |
| 申请公布号 | CN114216451A |
| 申请公布日 | 2022-03-22 |
| 授权公布号 | CN114216451B |
| 授权公告日 | 2024-03-26 |
| 分类号 | G01C21/00;G01C21/32 |
| 分类 | 测量;测试; |
| 申请人名称 | 北京云迹科技股份有限公司 |
| 申请人地址 | 北京市海淀区北四环西路67号7层702室 |
专利法律状态
2024-03-26
授权
状态信息
授权
2022-03-22
公布
状态信息
公布
摘要
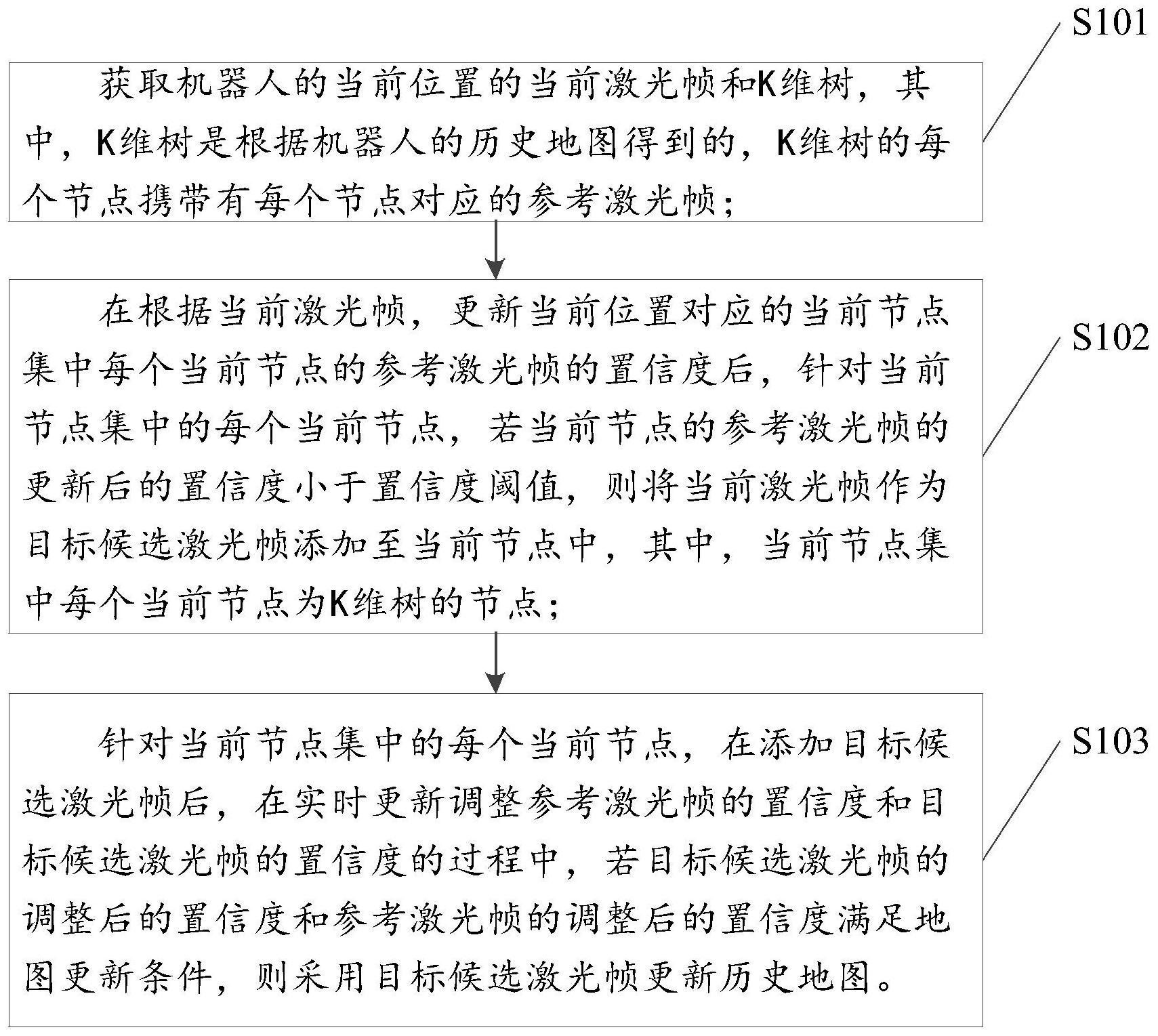
本发明涉及机器人技术领域,尤其涉及一种机器人地图的更新方法,该方法包括:获取机器人的当前位置的当前激光帧和K维树,其中,K维树的每个节点携带有对应的参考激光帧;在根据当前激光帧,更新当前位置对应的每个当前节点的参考激光帧的置信度后,针对当前节点集中的每个当前节点,若当前节点的参考激光帧的更新后的置信度小于置信度阈值,则将当前激光帧作为目标候选激光帧添加至当前节点中;在添加目标候选激光帧后,在更新调整参考激光帧的置信度和目标候选激光帧的置信度的过程中,若目标候选激光帧的调整后的置信度和参考激光帧的调整后的置信度满足地图更新条件,则采用目标候选激光帧更新历史地图。该方法提高机器人地图的更新效率。
 chinappkf
客服微信号
chinappkf
客服微信号
 chinappsw
商务合作
chinappsw
商务合作
 品牌风云榜
关注公众号
品牌风云榜
关注公众号
CopyRight 2005-2026 品牌网 chinapp.com 版权所有