

授权公布号:CN208993750U
一种用于自主机器人的转向反馈机构
有效
申请
2018-08-20
申请公布
1970-01-01
授权
2019-06-18
预估到期
2028-08-20
| 申请号 | CN201821336962.4 |
| 申请日 | 2018-08-20 |
| 授权公布号 | CN208993750U |
| 授权公告日 | 2019-06-18 |
| 分类号 | B62D5/04 |
| 分类 | 无轨陆用车辆; |
| 申请人名称 | 上海合时智能科技有限公司 |
| 申请人地址 | 上海市徐汇区凌云路398号335室 |
专利法律状态
2023-08-08
专利实施许可合同备案的生效、变更及注销
状态信息
专利实施许可合同备案的生效;IPC(主分类):B62D5/04;专利申请号:2018213369624;专利号:ZL2018213369624;合同备案号:X2023980038366;让与人:上海合时智能科技有限公司;受让人:上海合时无人机科技有限公司;实用新型名称:一种用于自主机器人的转向反馈机构;申请日:20180820;授权公告日:20190618;许可种类:普通许可;备案日期:20230721
2022-09-13
专利权质押合同登记的生效、变更及注销
状态信息
专利权质押合同登记的注销;IPC(主分类):B62D5/04;授权公告日:20190618;申请日:20180820;登记号:Y2021310000034;出质人:上海合时智能科技有限公司;质权人:太平洋安信农业保险股份有限公司上海闵行支公司;解除日:20220826
2021-05-14
专利权质押合同登记的生效、变更及注销
状态信息
专利权质押合同登记的生效;IPC(主分类):B62D5/04;登记号:Y2021310000034;登记生效日:20210427;出质人:上海合时智能科技有限公司;质权人:太平洋安信农业保险股份有限公司上海闵行支公司;实用新型名称:一种用于自主机器人的转向反馈机构;申请日:20180820;授权公告日:20190618
2019-06-18
授权
状态信息
授权
摘要
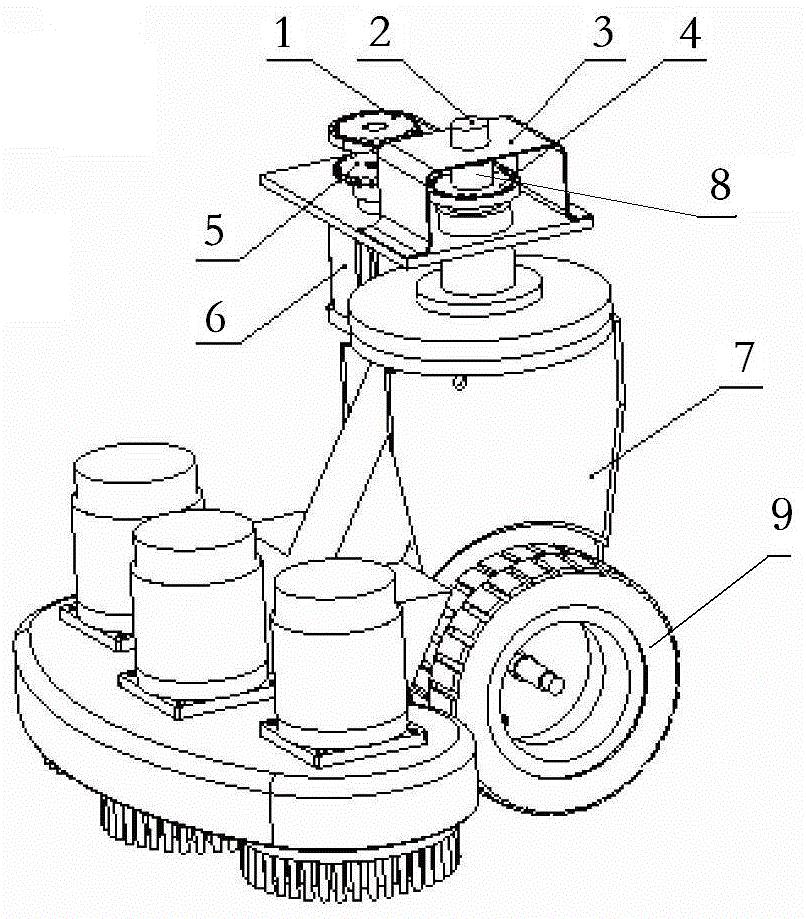
本实用新型涉及一种用于自主机器人的转向反馈机构,主要解决现有的一些轮式机器人的转弯系统为开环控制,无法实现机器人在自主导航系统下自主运动时的转弯运动。本实用新型的技术方案为:一种用于自主机器人的转向反馈机构,由驱动链轮、编码器、编码器支撑板、从动链轮、张紧链轮、驱动电机、转向轮组件、编码器连接轴组成,从动链轮安装在转向轮组件上,编码器通过编码器支撑板、编码器连接轴连接转向轮组件,实现转向轮的转向相对角度与编码器的转向角度同步。驱动链轮设置在从动链轮一侧,并通过链条传动,张紧链轮设置在驱动链轮和从动链轮之间与链条啮合,驱动链轮下方同轴连接驱动电机,驱动电机通过驱动链轮、张紧链轮、从动链轮驱动转向轮组件。
 chinappkf
客服微信号
chinappkf
客服微信号
 chinappsw
商务合作
chinappsw
商务合作
 品牌风云榜
关注公众号
品牌风云榜
关注公众号
CopyRight 2005-2026 品牌网 chinapp.com 版权所有