

授权公布号:CN113671958B
机器人的避障路径的确定方法、系统、电子设备和介质
有效
申请
2021-08-19
申请公布
2021-11-19
授权
2024-03-15
预估到期
2041-08-19
| 申请号 | CN202110952810.7 |
| 申请日 | 2021-08-19 |
| 申请公布号 | CN113671958A |
| 申请公布日 | 2021-11-19 |
| 授权公布号 | CN113671958B |
| 授权公告日 | 2024-03-15 |
| 分类号 | G05D1/43;G05D109/10N |
| 分类 | 控制;调节; |
| 申请人名称 | 上海合时智能科技有限公司 |
| 申请人地址 | 上海市徐汇区凌云路398号335室 |
专利法律状态
2024-03-15
授权
状态信息
授权
2021-11-19
公布
状态信息
公布
摘要
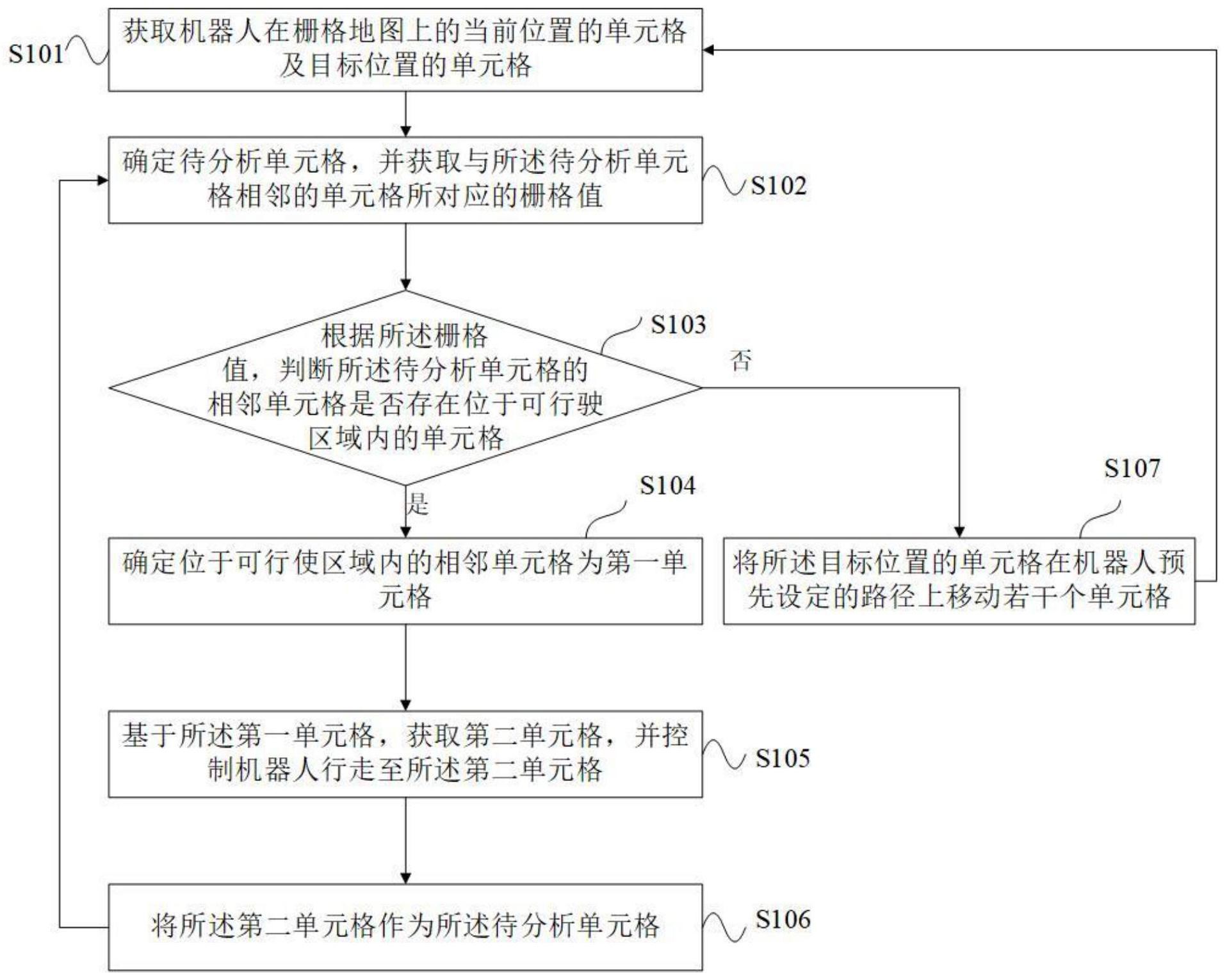
本发明公开了一种机器人的避障路径的确定方法、系统、电子设备和介质,确定方法包括:获取机器人在栅格地图上的当前位置的单元格及目标位置的单元格;确定待分析单元格,并获取与待分析单元格相邻的单元格所对应的栅格值;根据栅格值,判断所述待分析单元格的相邻单元格是否存在位于可行驶区域内的单元格,若是,则确定位于可行驶区域内的相邻单元格为第一单元格;基于第一单元格,获取第二单元格,并控制机器人行走至所述第二单元格;将第二单元格作为待分析单元格,并返回确定待分析单元格,并获取与待分析单元格相邻的单元格所对应的栅格值的步骤,直至机器人行走至所述目标位置的单元格。本发明降低了对硬件性能的要求且提高了处理效率。
 chinappkf
客服微信号
chinappkf
客服微信号
 chinappsw
商务合作
chinappsw
商务合作
 品牌风云榜
关注公众号
品牌风云榜
关注公众号
CopyRight 2005-2026 品牌网 chinapp.com 版权所有