

授权公布号:CN207595086U
一种可变形履带机器人底盘悬挂系统
有效
申请
2017-12-07
申请公布
1970-01-01
授权
2018-07-10
预估到期
2027-12-07
| 申请号 | CN201721691429.5 |
| 申请日 | 2017-12-07 |
| 授权公布号 | CN207595086U |
| 授权公告日 | 2018-07-10 |
| 分类号 | B62D55/104;B62D55/116 |
| 分类 | 无轨陆用车辆; |
| 申请人名称 | 极创机器人智能科技(山东)有限公司 |
| 申请人地址 | 山东省泰安市泰山区省庄工业园年华南街231号 |
专利法律状态
2020-09-15
专利权人的姓名或者名称、地址的变更
状态信息
专利权人的姓名或者名称、地址的变更;IPC(主分类):B62D 55/104;专利号:ZL2017216914295;变更事项:专利权人;变更前:极创机器人科技有限公司;变更后:极创机器人智能科技(山东)有限公司;变更事项:地址;变更前:271000 山东省泰安市泰山区省庄工业园年华南街231号;变更后:271000 山东省泰安市泰山区省庄工业园年华南街231号
2018-07-10
实用新型专利权授予
状态信息
授权
摘要
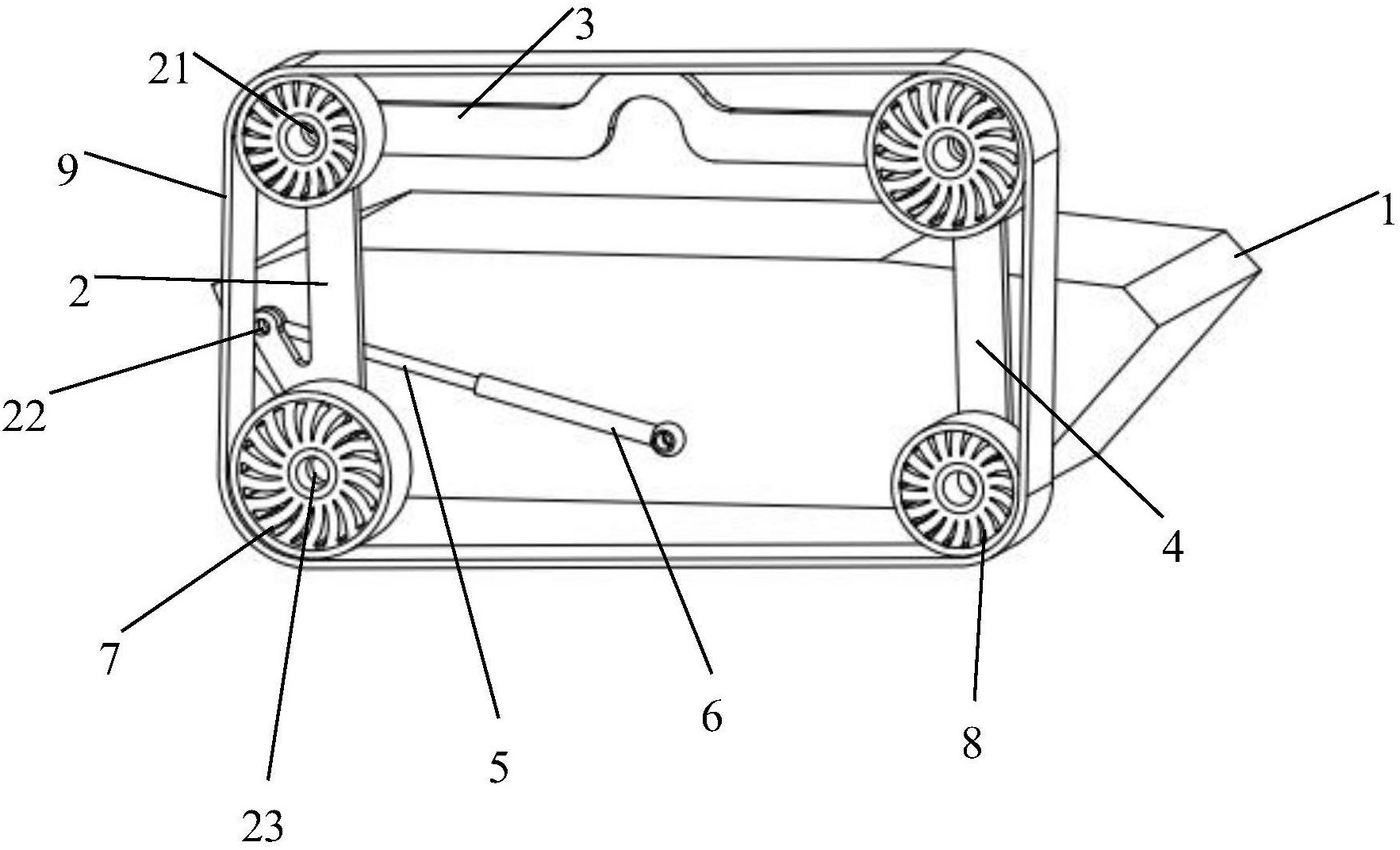
本实用新型公开了一种可变形履带机器人底盘悬挂系统,包括底盘大架、悬挂变形主动臂、摆臂上连杆、悬挂变形从动臂、环形履带、变形挺杆以及伺服电动缸;悬挂变形主动臂上设置有第一连接端、第二连接端、第三连接端,第三连接端铰接于底盘大架上且该位置设置有驱动轮,第一连接端与摆臂上连杆的一端相连且该位置设置有从动轮,摆臂上连杆的另一端与悬挂变形从动臂的一端相连且该位置设置有驱动轮,悬挂变形从动臂的另一端连接于底盘大架且该连接位置与第三连接端的位置在同一水平面,悬挂变形从动臂与底盘大架连接位置处还设置有从动轮。本实用新型在不增加机器人车体尺寸的基础上,成倍增加履带底盘的越障能力,将大幅提高机器人户外生存能力。
 chinappkf
客服微信号
chinappkf
客服微信号
 chinappsw
商务合作
chinappsw
商务合作
 品牌风云榜
关注公众号
品牌风云榜
关注公众号
CopyRight 2005-2026 品牌网 chinapp.com 版权所有