

授权公布号:CN211642386U
一种履带底盘的避震结构
有效
申请
2019-12-31
申请公布
1970-01-01
授权
2020-10-09
预估到期
2029-12-31
| 申请号 | CN201922471395.4 |
| 申请日 | 2019-12-31 |
| 授权公布号 | CN211642386U |
| 授权公告日 | 2020-10-09 |
| 分类号 | B62D55/108 |
| 分类 | 无轨陆用车辆; |
| 申请人名称 | 极创机器人智能科技(山东)有限公司 |
| 申请人地址 | 山东省泰安市泰山区省庄工业园年华南街231号 |
专利法律状态
2021-01-01
专利权人的姓名或者名称、地址的变更
状态信息
专利权人的姓名或者名称、地址的变更;IPC(主分类):B62D 55/108;专利号:ZL2019224713954;变更事项:专利权人;变更前:极创机器人科技有限公司;变更后:极创机器人智能科技(山东)有限公司;变更事项:地址;变更前:271000 山东省泰安市泰山区省庄工业园年华南街231号;变更后:271000 山东省泰安市泰山区省庄工业园年华南街231号
2020-10-09
授权
状态信息
授权
摘要
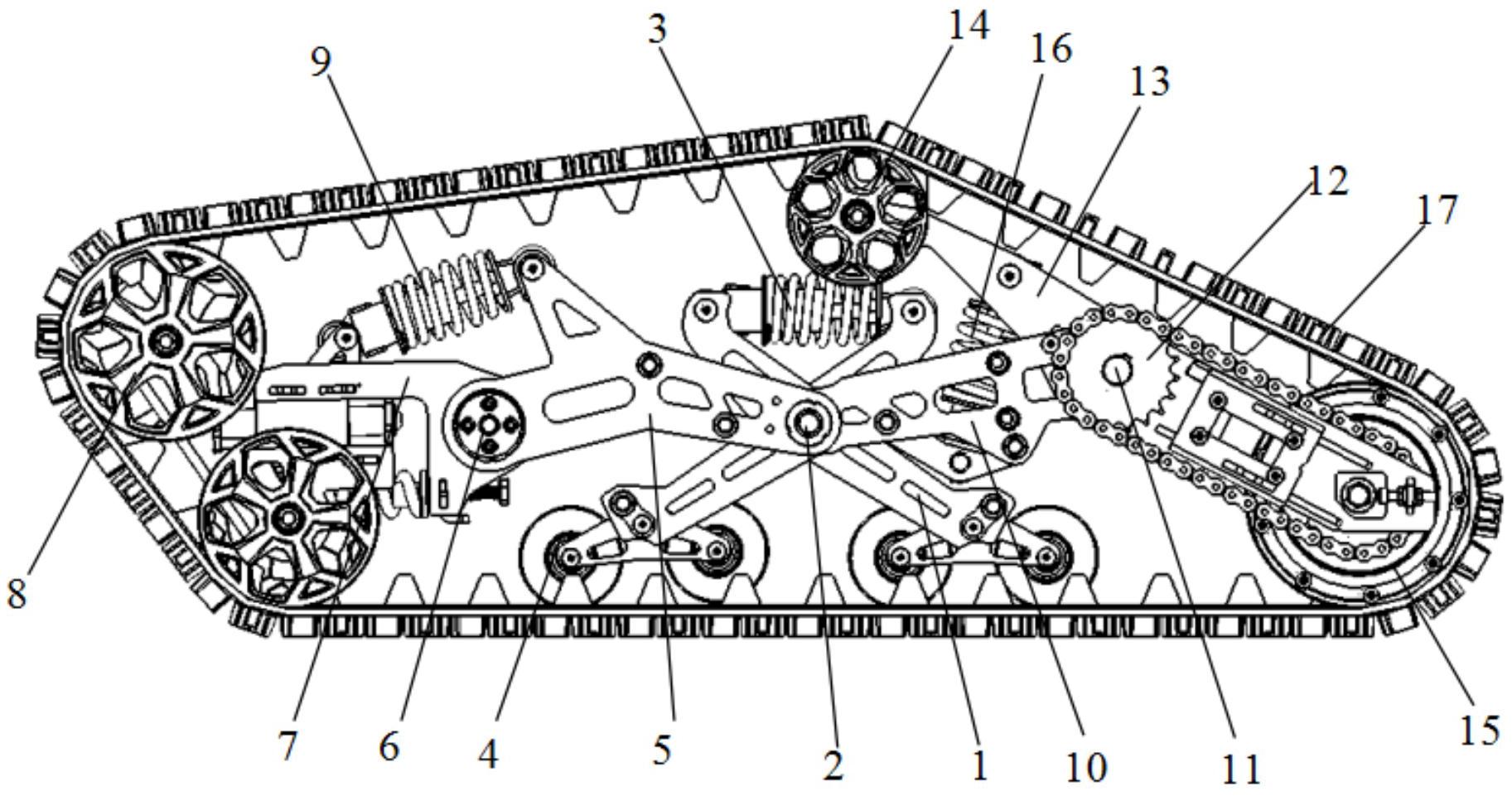
本实用新型公开了一种履带底盘的避震结构,包括X形摆臂组件、连接轴、第一避震器、平衡轮、前过桥摆臂组件、前连接轴、前摆臂组件、诱导轮、第二避震器、后过桥摆臂组件、后连接轴、主动轮、后摆臂组件、拖带轮、驱动轮、第三避震器;套于平衡轮、诱导轮、拖带轮、驱动轮上的履带。本新型的避震结构具有较大的避震行程,并且将前摆臂组件向前设置,后摆臂组件向后设置可在不增加车身长度的情况下实现较大的接地比,提升了整机接地长度和翻越垂直障碍的能力,并且诱导轮、平衡轮、驱动轮可灵活运动,且轮组间运动相互关联,对于复杂路况具有良好的贴地性能,能保证底盘运动稳定性。
 chinappkf
客服微信号
chinappkf
客服微信号
 chinappsw
商务合作
chinappsw
商务合作
 品牌风云榜
关注公众号
品牌风云榜
关注公众号
CopyRight 2005-2026 品牌网 chinapp.com 版权所有