

授权公布号:CN107168331B
基于光电鼠标传感器位移检测的机器人室内地图创建方法
有效
申请
2017-06-20
申请公布
2017-09-15
授权
2021-04-02
预估到期
2037-06-20
| 申请号 | CN201710471252.6 |
| 申请日 | 2017-06-20 |
| 申请公布号 | CN107168331A |
| 申请公布日 | 2017-09-15 |
| 授权公布号 | CN107168331B |
| 授权公告日 | 2021-04-02 |
| 分类号 | G05D1/02;G01C21/00 |
| 分类 | 控制;调节; |
| 申请人名称 | 南京阿凡达机器人科技有限公司 |
| 申请人地址 | 江苏省南京市高淳经济开发区古檀大道3号 |
专利法律状态
2021-04-02
授权
状态信息
授权
2017-10-17
实质审查的生效
状态信息
实质审查的生效;IPC(主分类):G05D1/02;申请日:20170620
2017-09-15
公布
状态信息
公布
摘要
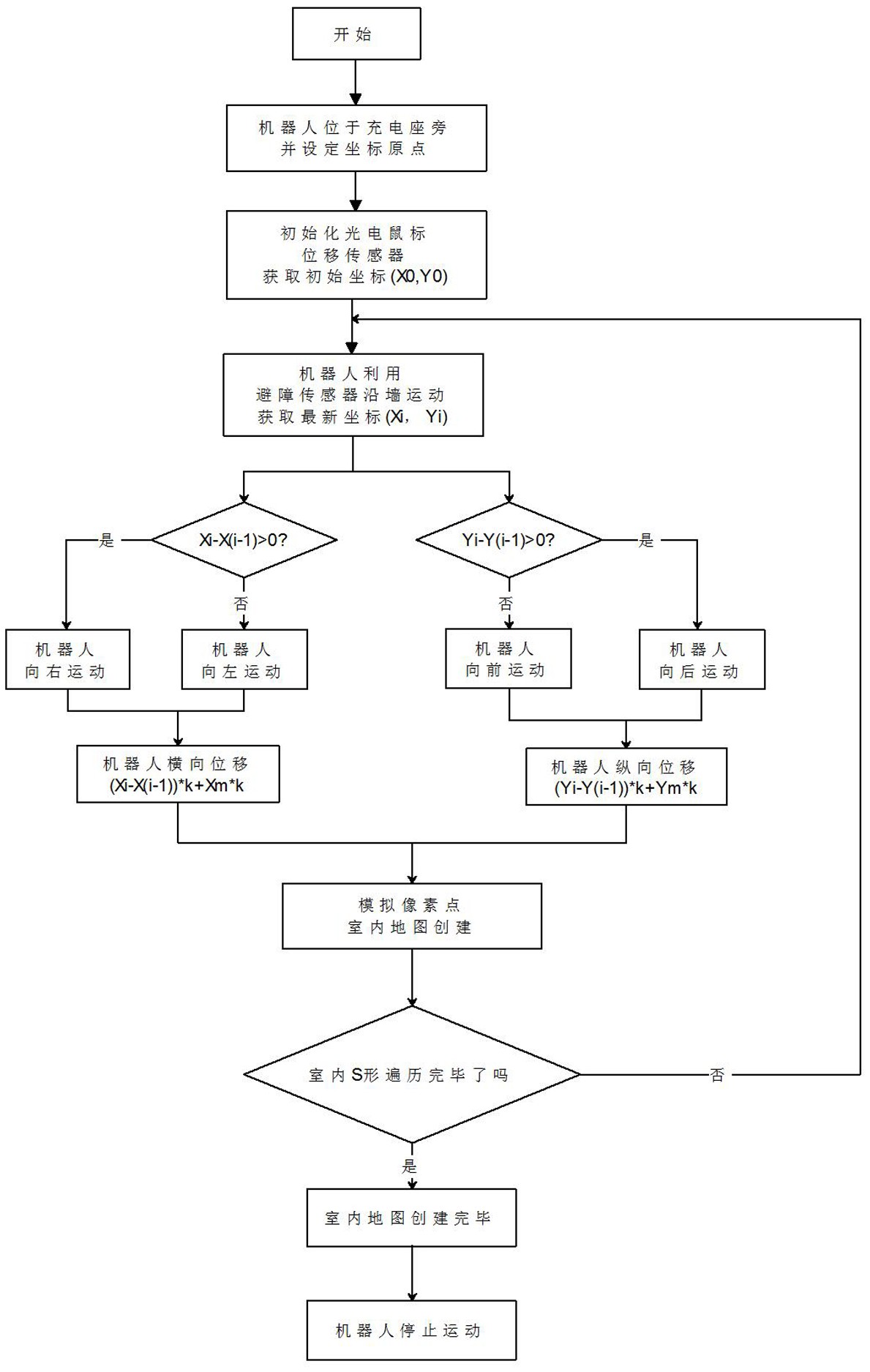
本发明提出一种基于光电鼠标传感器位移检测的机器人室内地图创建方法,主要包括以下步骤:1)将光电鼠标传感器的坐标系统与机器人所在的地面坐标系统通过映射来完成对应关系;2)将光电鼠标传感器的坐标系统映射到地面坐标系;3)对室内环境进行二维空间建模,把室内环境地图用二维数组表示,并对环境中的障碍物实行矩形化建模,而后应用矩形化模型中的关键点将环境分解成矩形块;4)机器人从初始位置经过一系列的位置,获得该位置环境信息,确定移动机器人的位置,并且同时创建环境地图。本发明的方法,具有测量精确度高、线性度好、测量范围大、成本低的优点。
 客服微信号
客服微信号
 商务合作微信
商务合作微信
 关注公众号
关注公众号
CopyRight 2005-2026 品牌网 chinapp.com 版权所有