

授权公布号:CN108268041B
一种用于机器人的障碍物检测方法及系统
有效
申请
2018-01-23
申请公布
2018-07-10
授权
2021-05-11
预估到期
2038-01-23
| 申请号 | CN201810061513.1 |
| 申请日 | 2018-01-23 |
| 申请公布号 | CN108268041A |
| 申请公布日 | 2018-07-10 |
| 授权公布号 | CN108268041B |
| 授权公告日 | 2021-05-11 |
| 分类号 | G05D1/02;G01C3/10 |
| 分类 | 控制;调节; |
| 申请人名称 | 南京阿凡达机器人科技有限公司 |
| 申请人地址 | 江苏省南京市高淳经济开发区古檀大道3号 |
专利法律状态
2021-05-11
授权
状态信息
授权
2018-08-03
实质审查的生效
状态信息
实质审查的生效
2018-07-10
公布
状态信息
公布
摘要
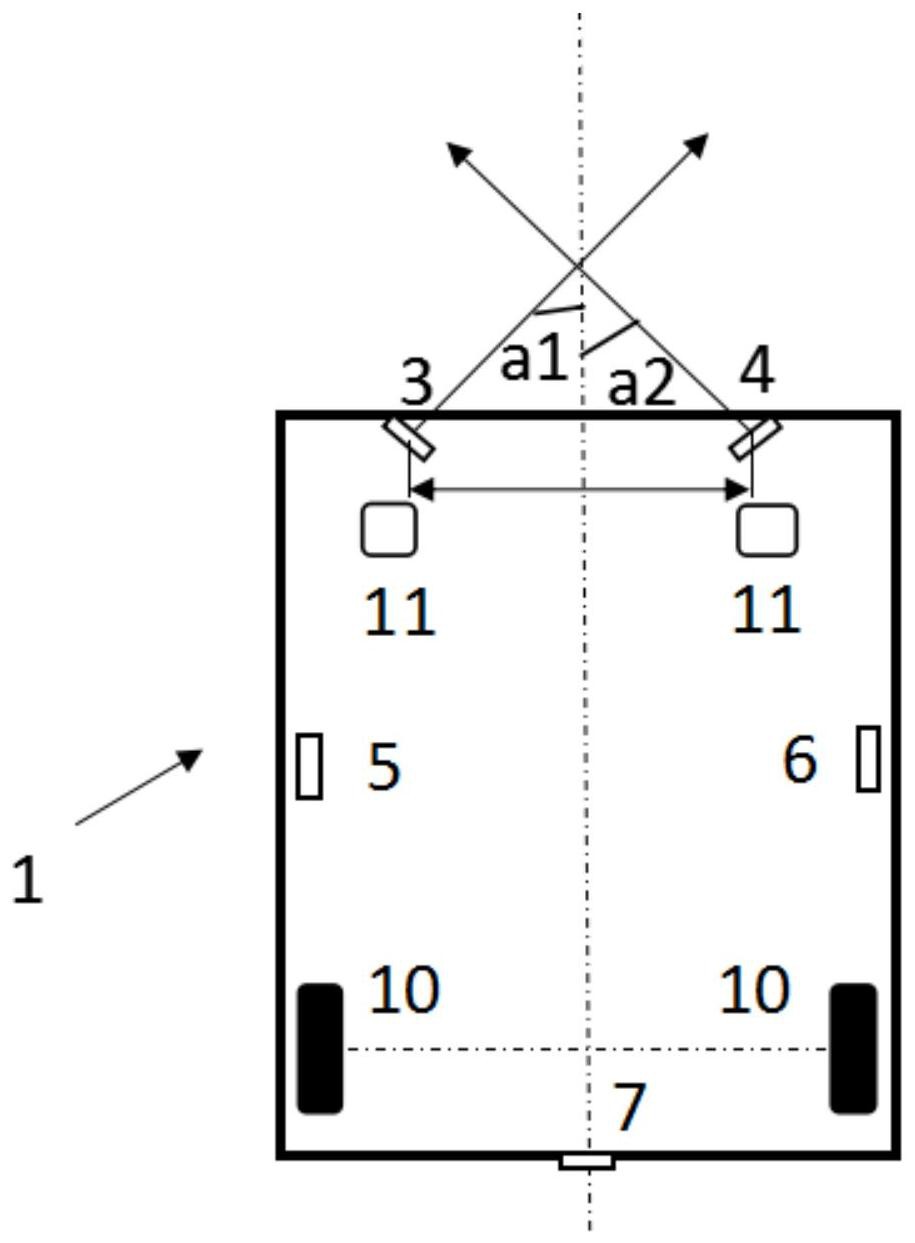
本发明提供了一种用于机器人的障碍物检测系统及方法,包括:底盘,底盘上设有两个辅助轮和两个主轮,主轮靠近底盘的第二端;底盘上还设有前左侧距离传感器、前右侧距离传感器、中左侧距离传感器、中右侧距离传感器和后中部距离传感器;其中,前两个传感器位于底盘的第一端,第一端与第二端相对;第三个传感器位于底盘的第三端,第四个传感器位于底盘的第四端,第三端与第四端相对,且第三端与第一端互相垂直;最后一个传感器位于底盘的第二端,其与第三个传感器的距离和其与第四个传感器的距离相同,其与第一个传感器的距离和其与第二个传感器的距离相同。本发明可以采用少量传感器,却可以完成全方位的障碍物扫描覆盖,降低了成本。
 客服微信号
客服微信号
 商务合作微信
商务合作微信
 关注公众号
关注公众号
CopyRight 2005-2026 品牌网 chinapp.com 版权所有