

授权公布号:CN107886057B
一种机器人的挥手检测方法、系统及一种机器人
有效
申请
2017-10-30
申请公布
2018-04-06
授权
2021-03-30
预估到期
2037-10-30
| 申请号 | CN201711042859.9 |
| 申请日 | 2017-10-30 |
| 申请公布号 | CN107886057A |
| 申请公布日 | 2018-04-06 |
| 授权公布号 | CN107886057B |
| 授权公告日 | 2021-03-30 |
| 分类号 | G06K9/46;G06K9/00;G06K9/62 |
| 分类 | 计算;推算;计数; |
| 申请人名称 | 南京阿凡达机器人科技有限公司 |
| 申请人地址 | 江苏省南京市高淳经济开发区古檀大道3号 |
专利法律状态
2021-03-30
授权
状态信息
授权
2018-05-01
实质审查的生效
状态信息
实质审查的生效
2018-04-06
公布
状态信息
公布
摘要
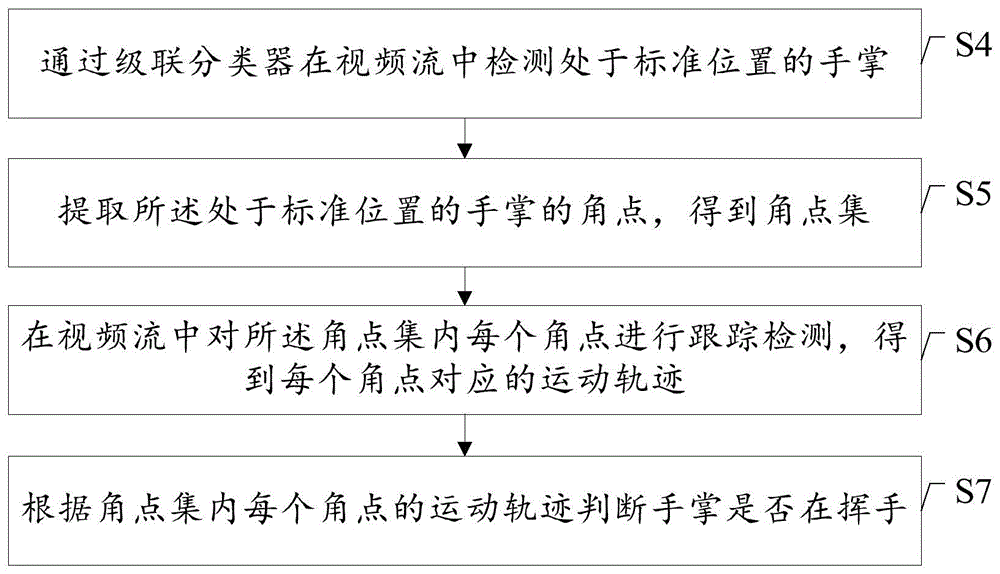
本发明公开了一种机器人的挥手检测方法、系统及一种机器人,方法包括:通过级联分类器在视频流中检测处于标准位置的手掌;提取所述处于标准位置的手掌的角点,得到角点集;在视频流中对所述角点集内每个角点进行跟踪检测,得到每个角点对应的运动轨迹;根据所述角点集内每个角点的运动轨迹判断手掌是否在挥手。本发明实现了复杂环境下对挥手的检测,对动态背景噪声的抗干扰能力强,检测正确率高。

 客服微信号
客服微信号
 商务合作微信
商务合作微信
 关注公众号
关注公众号
CopyRight 2005-2026 品牌网 chinapp.com 版权所有