

授权公布号:CN109129467B
一种基于认知的机器人交互方法及系统
有效
申请
2018-07-27
申请公布
2019-01-04
授权
2022-03-25
预估到期
2038-07-27
| 申请号 | CN201810845004.8 |
| 申请日 | 2018-07-27 |
| 申请公布号 | CN109129467A |
| 申请公布日 | 2019-01-04 |
| 授权公布号 | CN109129467B |
| 授权公告日 | 2022-03-25 |
| 分类号 | G06F3/01;B25J9/16 |
| 分类 | 手动工具;轻便机动工具;手动器械的手柄;车间设备;机械手; |
| 申请人名称 | 南京阿凡达机器人科技有限公司 |
| 申请人地址 | 江苏省南京市高淳经济开发区古檀大道3号 |
专利法律状态
2022-03-25
授权
状态信息
授权
2019-01-04
公布
状态信息
公布
摘要
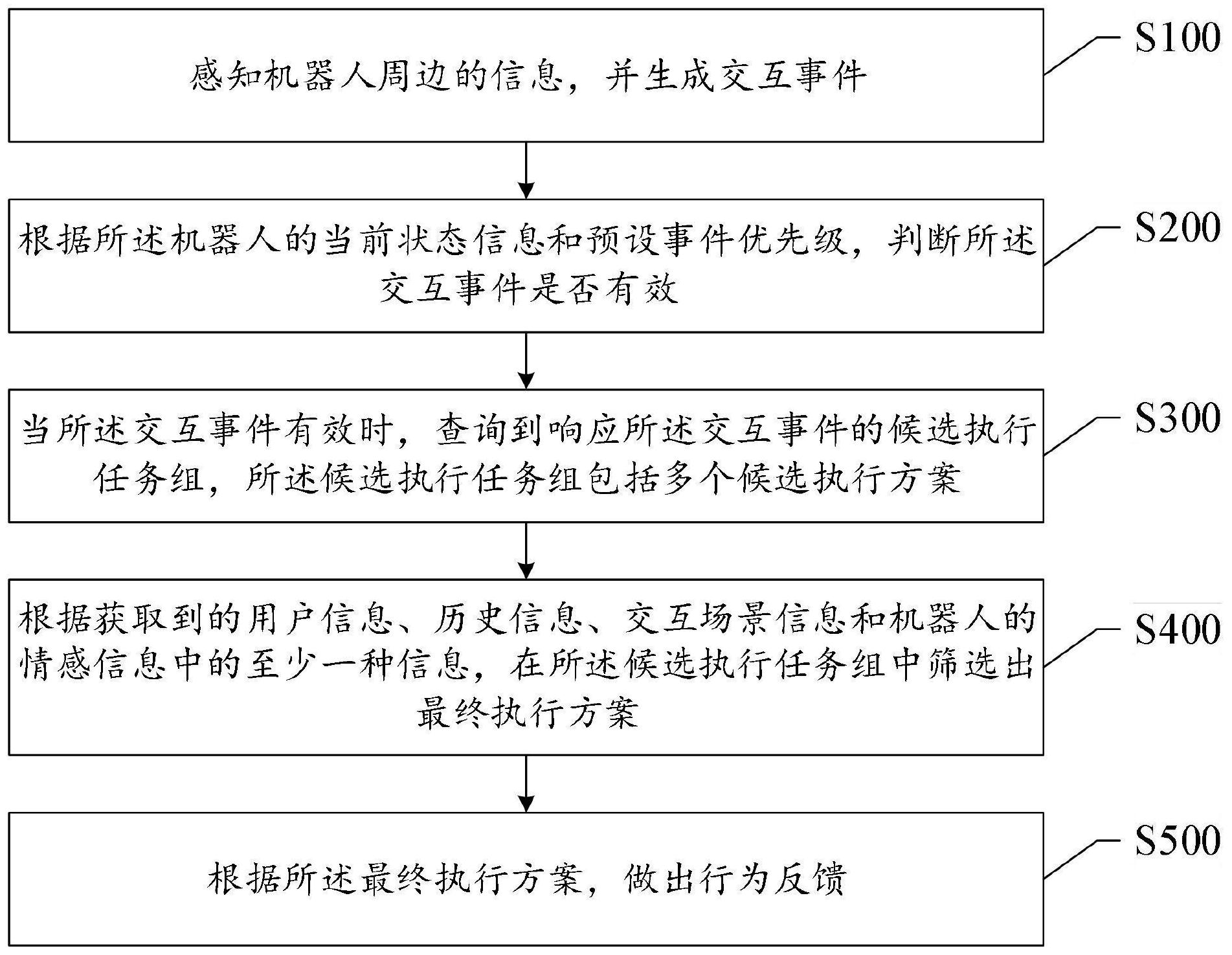
本发明公开了一种基于认知的机器人交互方法及系统,方法包括:感知机器人周边的信息,并生成交互事件;判断交互事件是否有效;当交互事件有效时,查询到响应交互事件的候选执行任务组;根据获取到的用户信息、历史信息、交互场景信息和机器人的情感信息中的至少一种信息,在候选执行任务组中筛选出最终执行方案;根据最终执行方案,做出行为反馈。本发明中,机器人获取交互事件后,通过自主认知判断交互事件是否有效,再结合用户信息、历史信息、交互场景信息和自身的情感信息,形成自己的认知,以从候选执行任务组中筛选出最终执行方案,使机器人拥有拟人化的交互能力,以与用户进行智能交互,提高用户的交互体验。
 客服微信号
客服微信号
 商务合作微信
商务合作微信
 关注公众号
关注公众号
CopyRight 2005-2026 品牌网 chinapp.com 版权所有