

授权公布号:CN216266086U
新型结构仿生手指及仿生机械手
有效
申请
2021-10-22
申请公布
1970-01-01
授权
2022-04-12
预估到期
2031-10-22
| 申请号 | CN202122553240.2 |
| 申请日 | 2021-10-22 |
| 授权公布号 | CN216266086U |
| 授权公告日 | 2022-04-12 |
| 分类号 | B25J15/00 |
| 分类 | 手动工具;轻便机动工具;手动器械的手柄;车间设备;机械手; |
| 申请人名称 | 南京阿凡达机器人科技有限公司 |
| 申请人地址 | 江苏省南京市高淳经济开发区古檀大道3号 |
专利法律状态
2022-04-12
授权
状态信息
授权
摘要
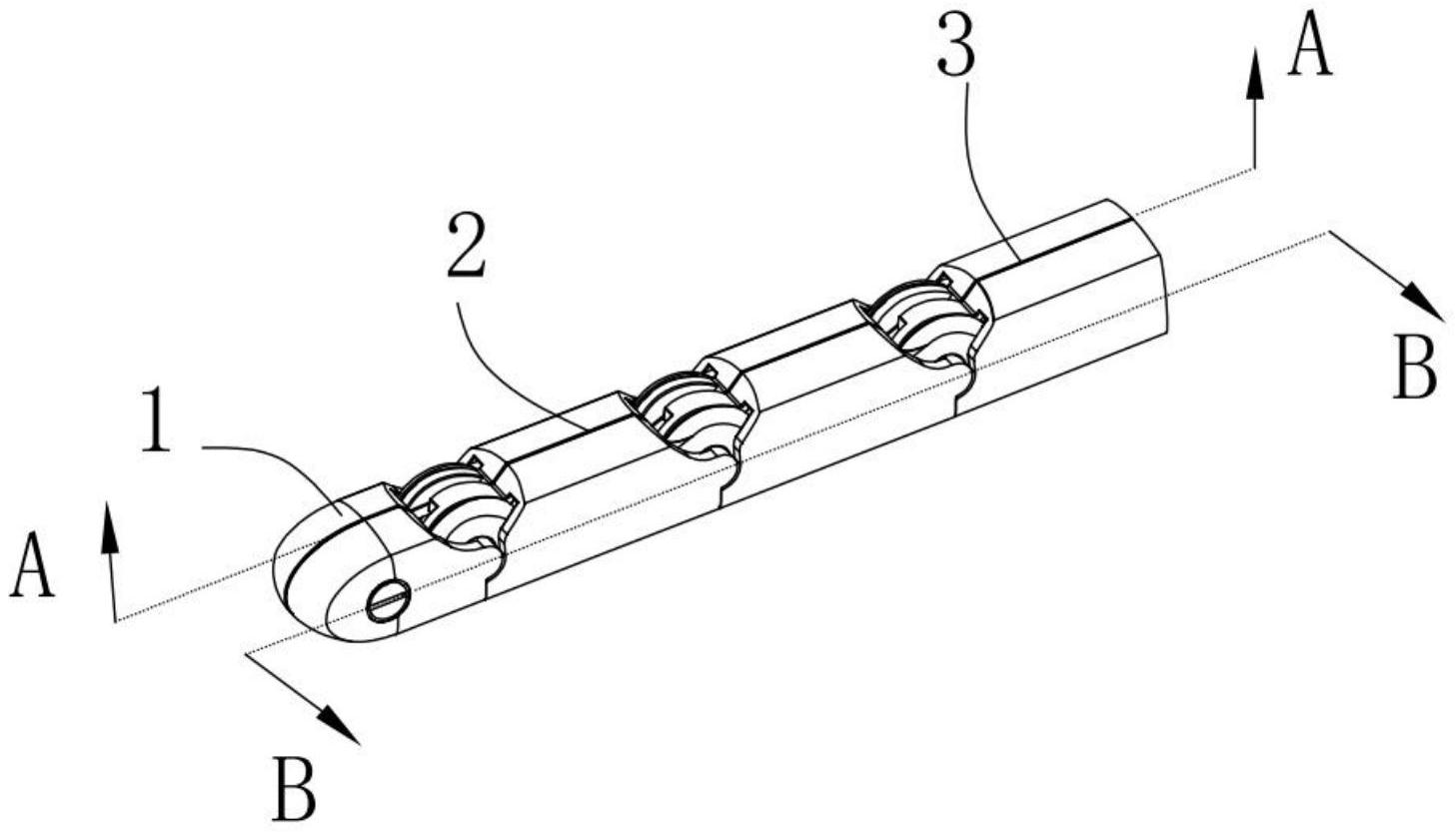
本实用新型涉及了新型结构仿生手指及仿生机械手,所述新型仿生机械手指包括指尖、指中、线轮组件、驱动组件、第一牵引绳和第二牵引绳。指尖可转动连接于所述指中的前端,所述线轮组件,置于指尖和指中的连接处,引导指尖绕所述指中一端转动;驱动装置用于提供手指弯曲和伸直的动力;第一牵引绳的前端和所述第二牵引绳的前端均固定连接于所述指尖连杆前端,第一牵引绳的后端端和第二牵引绳的后端交叉绕过线轮组件与驱动组件相连;通过驱动组件牵拉第一牵引绳和第二牵引绳,带动指尖围绕指中的一端转动,实现仿生手指的弯曲与伸直,该装置结构简单,手指控制弯曲到位。
 客服微信号
客服微信号
 商务合作微信
商务合作微信
 关注公众号
关注公众号
CopyRight 2005-2026 品牌网 chinapp.com 版权所有