

授权公布号:CN109176541B
一种实现机器人跳舞的方法、设备和储存介质
有效
申请
2018-09-06
申请公布
2019-01-11
授权
2022-05-06
预估到期
2038-09-06
| 申请号 | CN201811040032.9 |
| 申请日 | 2018-09-06 |
| 申请公布号 | CN109176541A |
| 申请公布日 | 2019-01-11 |
| 授权公布号 | CN109176541B |
| 授权公告日 | 2022-05-06 |
| 分类号 | B25J11/00;B25J9/16 |
| 分类 | 手动工具;轻便机动工具;手动器械的手柄;车间设备;机械手; |
| 申请人名称 | 南京阿凡达机器人科技有限公司 |
| 申请人地址 | 江苏省南京市高淳经济开发区古檀大道3号 |
专利法律状态
2022-05-06
授权
状态信息
授权
2019-01-11
公布
状态信息
公布
摘要
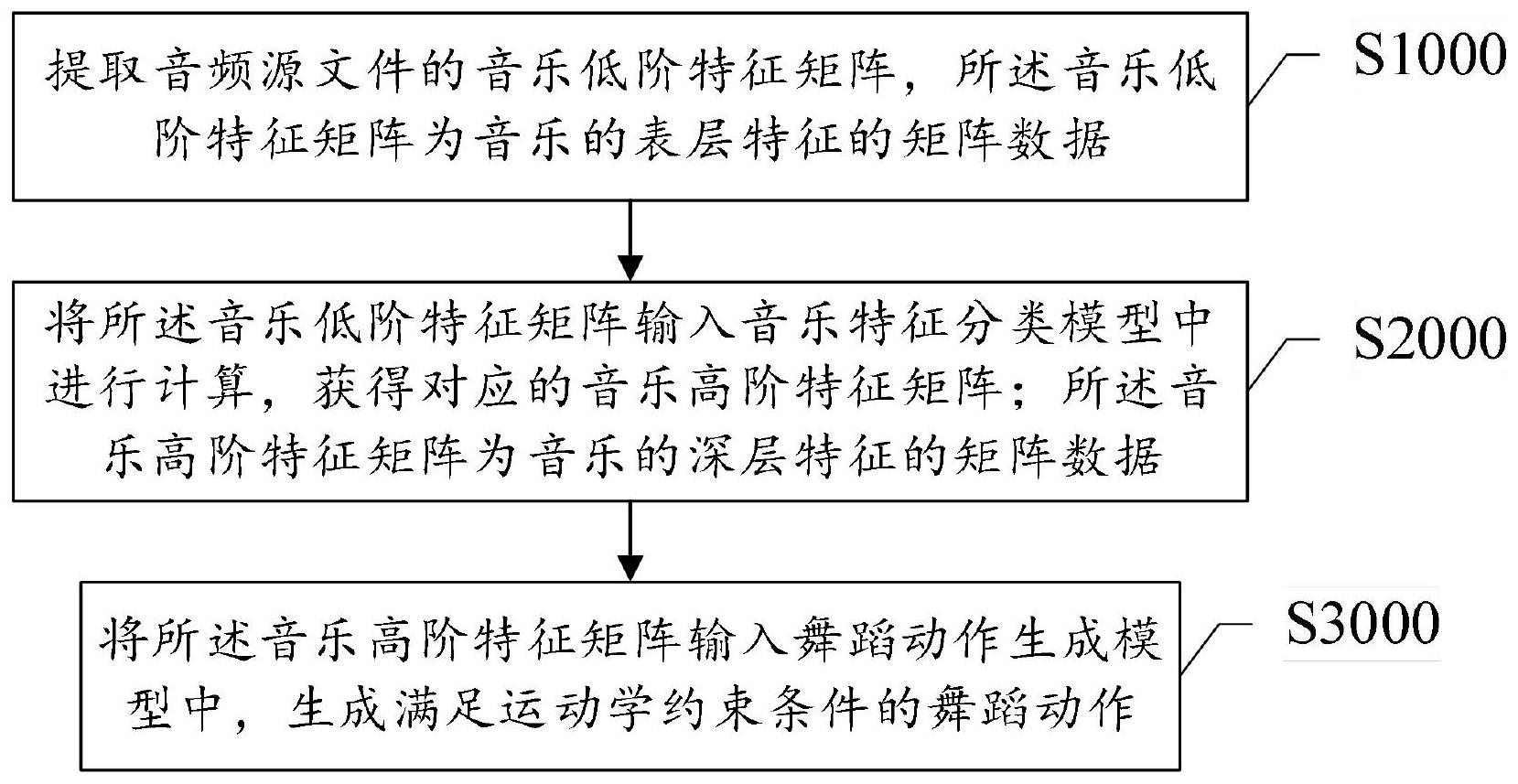
本发明提供了一种实现机器人跳舞的方法、设备和储存介质,其方法包括:提取音频源文件的音乐低阶特征矩阵;所述音乐低阶特征矩阵为音乐的表层特征的矩阵数据;将所述音乐低阶特征矩阵输入音乐特征分类模型中进行计算,获得对应的音乐高阶特征矩阵;所述音乐高阶特征矩阵为音乐的深层特征的矩阵数据;将所述音乐高阶特征矩阵输入舞蹈动作生成模型中,生成满足运动学约束条件的舞蹈动作。本发明实现减轻开发人员的时间精力,使得机器人能够根据多个维度的音乐特征信息进行自主跳舞,以及提高舞蹈动作与音乐特征信息之间的匹配度的目的。
 客服微信号
客服微信号
 商务合作微信
商务合作微信
 关注公众号
关注公众号
CopyRight 2005-2026 品牌网 chinapp.com 版权所有