

授权公布号:CN106846468B
一种基于ROS系统的机械臂建模及运动规划实现方法
有效
申请
2017-01-25
申请公布
2017-06-13
授权
2021-05-07
预估到期
2037-01-25
| 申请号 | CN201710056239.4 |
| 申请日 | 2017-01-25 |
| 申请公布号 | CN106846468A |
| 申请公布日 | 2017-06-13 |
| 授权公布号 | CN106846468B |
| 授权公告日 | 2021-05-07 |
| 分类号 | G06T17/00;B25J9/16 |
| 分类 | 计算;推算;计数; |
| 申请人名称 | 南京阿凡达机器人科技有限公司 |
| 申请人地址 | 江苏省南京市高淳经济开发区古檀大道3号 |
专利法律状态
2021-05-07
授权
状态信息
授权
2017-07-07
实质审查的生效
状态信息
实质审查的生效;IPC(主分类):G06T17/00;申请日:20170125
2017-06-13
公布
状态信息
公布
摘要
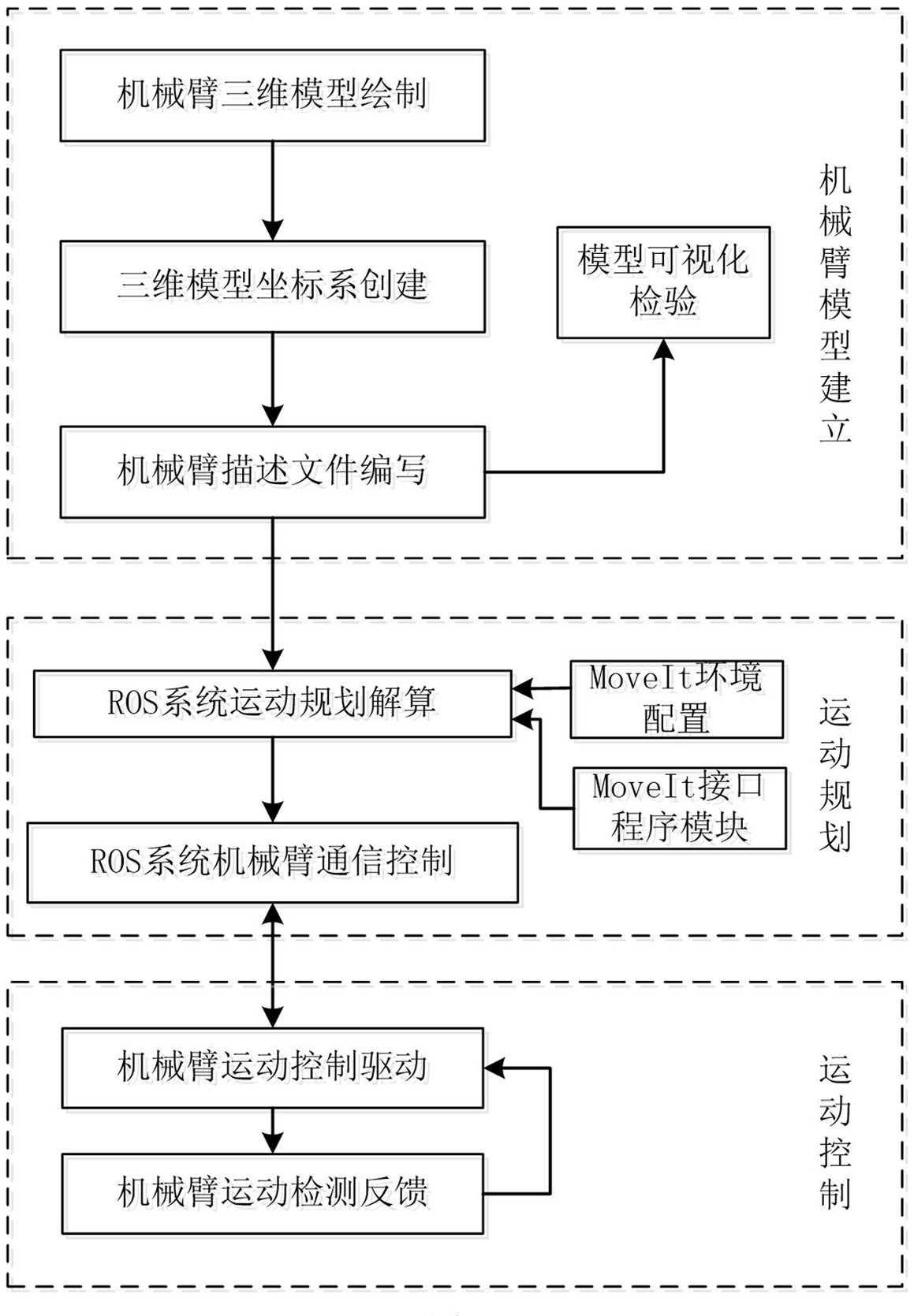
本发明提出一种基于ROS系统的机械臂建模及运动规划实现方法,主要包括以下步骤:1.机械臂各个零部件三维模型的绘制;2.机械臂各个零部件三维模型的坐标系的创建和保存;3.编写基于XML的机械臂描述文件;4.基于ROS系统的机械臂运动规划解算;5.系统通信及机械臂运动控制实现。本发明的方法可以快速建立机械臂的运动学模型和动力学模型,结合ROS系统的MoveIt模块调用相应的运动规划库实现机器人的运动规划,最后将运动规划解算的结果发送至机械臂的运动控制模块,从而实现机械臂的定位、抓取、空间跟随等动作。本发明的方法可以在ROS系统下对机械臂的运动规划进行快速开发和验证,既可以用于科研中的算法验证,也可以用于实际生产中的机械臂控制。
 客服微信号
客服微信号
 商务合作微信
商务合作微信
 关注公众号
关注公众号
CopyRight 2005-2026 品牌网 chinapp.com 版权所有