

授权公布号:CN107766855B
基于机器视觉的棋子定位方法、系统、存储介质及机器人
有效
申请
2017-10-25
申请公布
2018-03-06
授权
2021-09-07
预估到期
2037-10-25
| 申请号 | CN201711006222.4 |
| 申请日 | 2017-10-25 |
| 申请公布号 | CN107766855A |
| 申请公布日 | 2018-03-06 |
| 授权公布号 | CN107766855B |
| 授权公告日 | 2021-09-07 |
| 分类号 | G06K9/20;G06K9/32;G06K9/46;G06T7/11;G06T7/80 |
| 分类 | 计算;推算;计数; |
| 申请人名称 | 南京阿凡达机器人科技有限公司 |
| 申请人地址 | 江苏省南京市高淳经济开发区古檀大道3号 |
专利法律状态
2021-09-07
授权
状态信息
授权
2018-03-30
实质审查的生效
状态信息
实质审查的生效
2018-03-06
公布
状态信息
公布
摘要
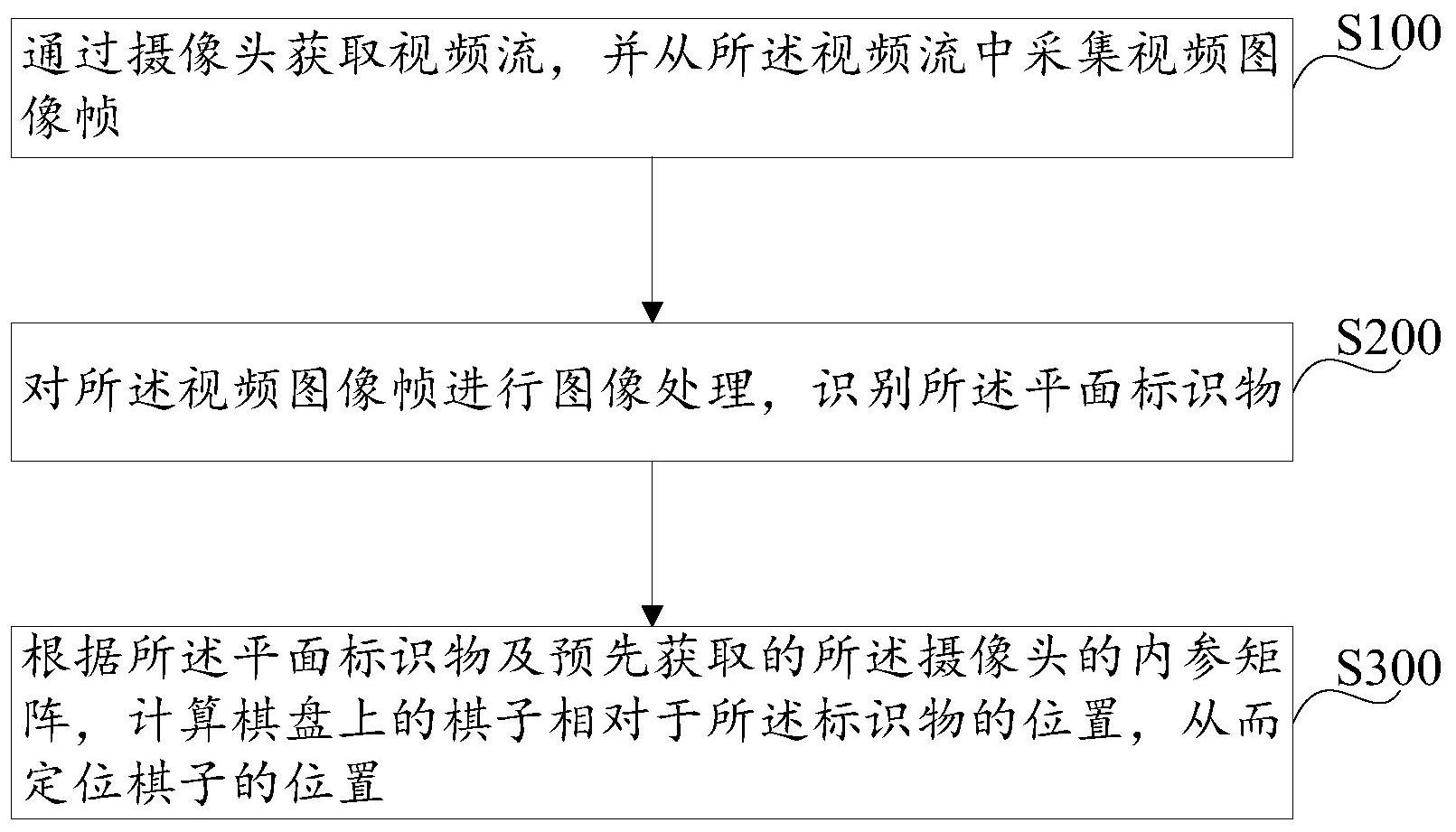
本发明公开了一种基于机器视觉的棋子定位方法,应用于对设有平面标识物的棋盘上的棋子进行定位,棋子定位方法包括:通过摄像头获取视频流,并从视频流中采集视频图像帧;对视频图像帧进行图像处理,识别平面标识物;根据平面标识物及预先获取的摄像头的内参矩阵,计算棋盘上的棋子相对于标识物的位置,从而定位棋子的位置。此外,基于相同的技术构思,本发明还公开了一种基于机器视觉的棋子定位系统、存储介质及机器人。本发明不需要棋盘进行特别的电路实现,且棋盘与机器人之间不需要进行数据通信,更加便于布置。此外,本发明的平面标志物的设立,让机器人在复杂场景中能够准确的识别出该平面标志物,不会受到复杂场景的干扰。
 客服微信号
客服微信号
 商务合作微信
商务合作微信
 关注公众号
关注公众号
CopyRight 2005-2026 品牌网 chinapp.com 版权所有