

授权公布号:CN107932536B
一种仿人五指灵巧手装置
有效
申请
2017-12-21
申请公布
2018-04-20
授权
2023-06-23
预估到期
2037-12-21
| 申请号 | CN201711393140.X |
| 申请日 | 2017-12-21 |
| 申请公布号 | CN107932536A |
| 申请公布日 | 2018-04-20 |
| 授权公布号 | CN107932536B |
| 授权公告日 | 2023-06-23 |
| 分类号 | B25J15/00;B25J15/10 |
| 分类 | 手动工具;轻便机动工具;手动器械的手柄;车间设备;机械手; |
| 申请人名称 | 大连大华中天科技有限公司 |
| 申请人地址 | 辽宁省大连市高新技术产业园火炬路32A号B座10层 |
专利法律状态
2023-06-23
授权
状态信息
授权
2018-05-15
实质审查的生效
状态信息
实质审查的生效;IPC(主分类):B25J15/00;申请日:20171221
2018-04-20
公布
状态信息
公布
摘要
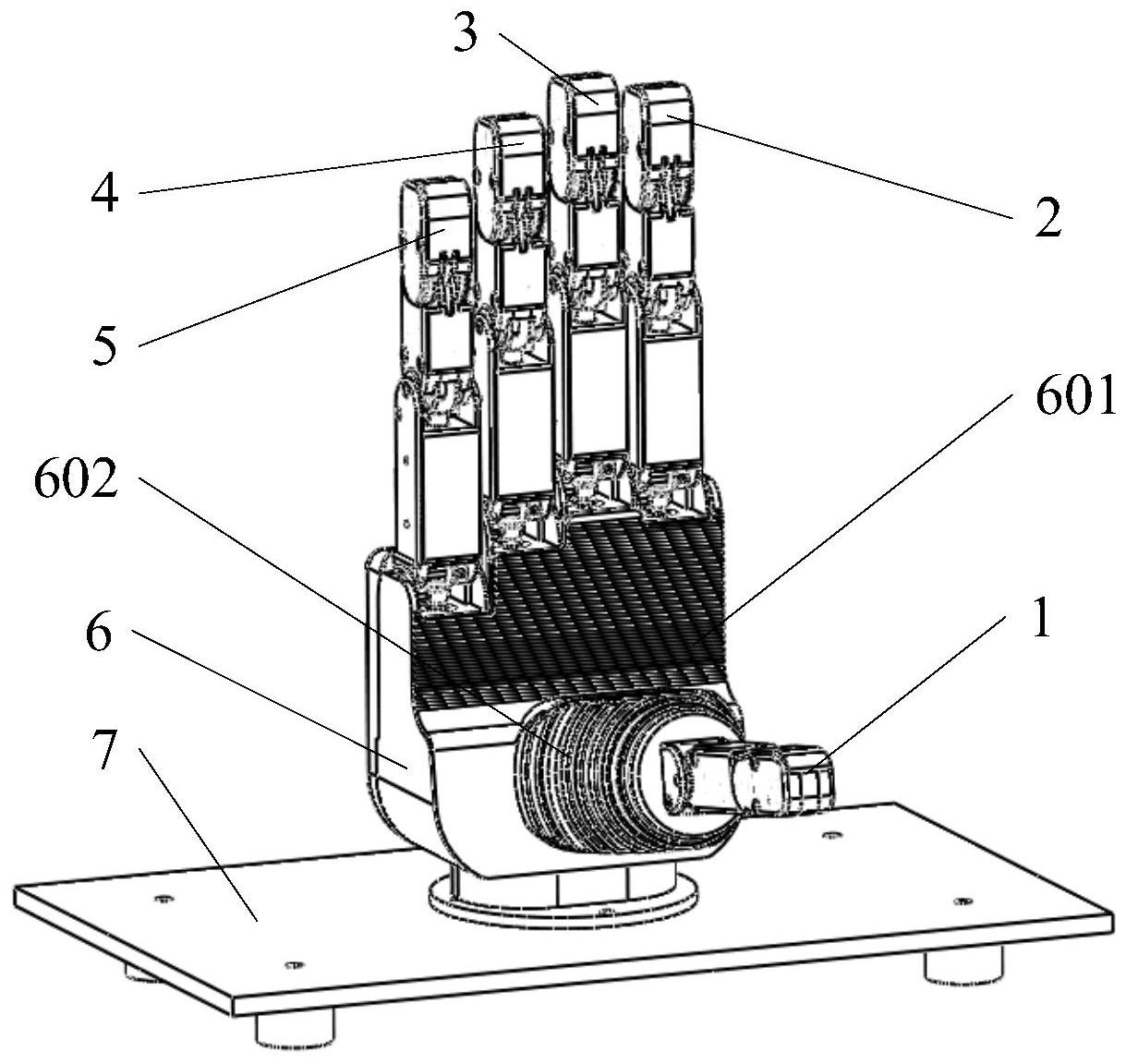
一种仿人五指灵巧手装置属于机器人领域,包括拇指、食指、中指、无名指、小指、手掌、固定装置、手掌盖,灵巧手的尺寸与成年人手相当,共15个自由度;拇指可与中指运动至同一抓取平面,与其它四指成一固定角度布置;五指的指节表面及手掌表面均安装触觉传感器;驱动系统、控制系统集成于灵巧手内部。本发明在不过多增加手指自由度的情况下,通过合理设计拇指结构、合理布置拇指位置,使灵巧手获得较高的抓取物体的能力;所涉及灵巧手指的欠驱动系统,其传动方式设计为“单电机‑双腱绳”机构,使灵巧手在物体抓取过程中实现良好的自适应性和柔顺性;本发明基于更加严格的模块化设计思想,四个手指结构相同,手指、拇指均与手掌完全独立,加工和装配更加简洁。
 chinappkf
客服微信号
chinappkf
客服微信号
 chinappsw
商务合作
chinappsw
商务合作
 品牌风云榜
关注公众号
品牌风云榜
关注公众号
CopyRight 2005-2026 品牌网 chinapp.com 版权所有