

授权公布号:CN109176559B
一种机器人及控制方法、系统
有效
申请
2018-10-24
申请公布
2019-01-11
授权
2022-05-24
预估到期
2038-10-24
| 申请号 | CN201811243054.5 |
| 申请日 | 2018-10-24 |
| 申请公布号 | CN109176559A |
| 申请公布日 | 2019-01-11 |
| 授权公布号 | CN109176559B |
| 授权公告日 | 2022-05-24 |
| 分类号 | B25J11/00;B25J9/16 |
| 分类 | 手动工具;轻便机动工具;手动器械的手柄;车间设备;机械手; |
| 申请人名称 | 上海思依暄机器人科技股份有限公司 |
| 申请人地址 | 上海市中国(上海)自由贸易试验区芳春路400号1幢3层 |
专利法律状态
2022-05-24
授权
状态信息
授权
2019-01-11
公布
状态信息
公布
摘要
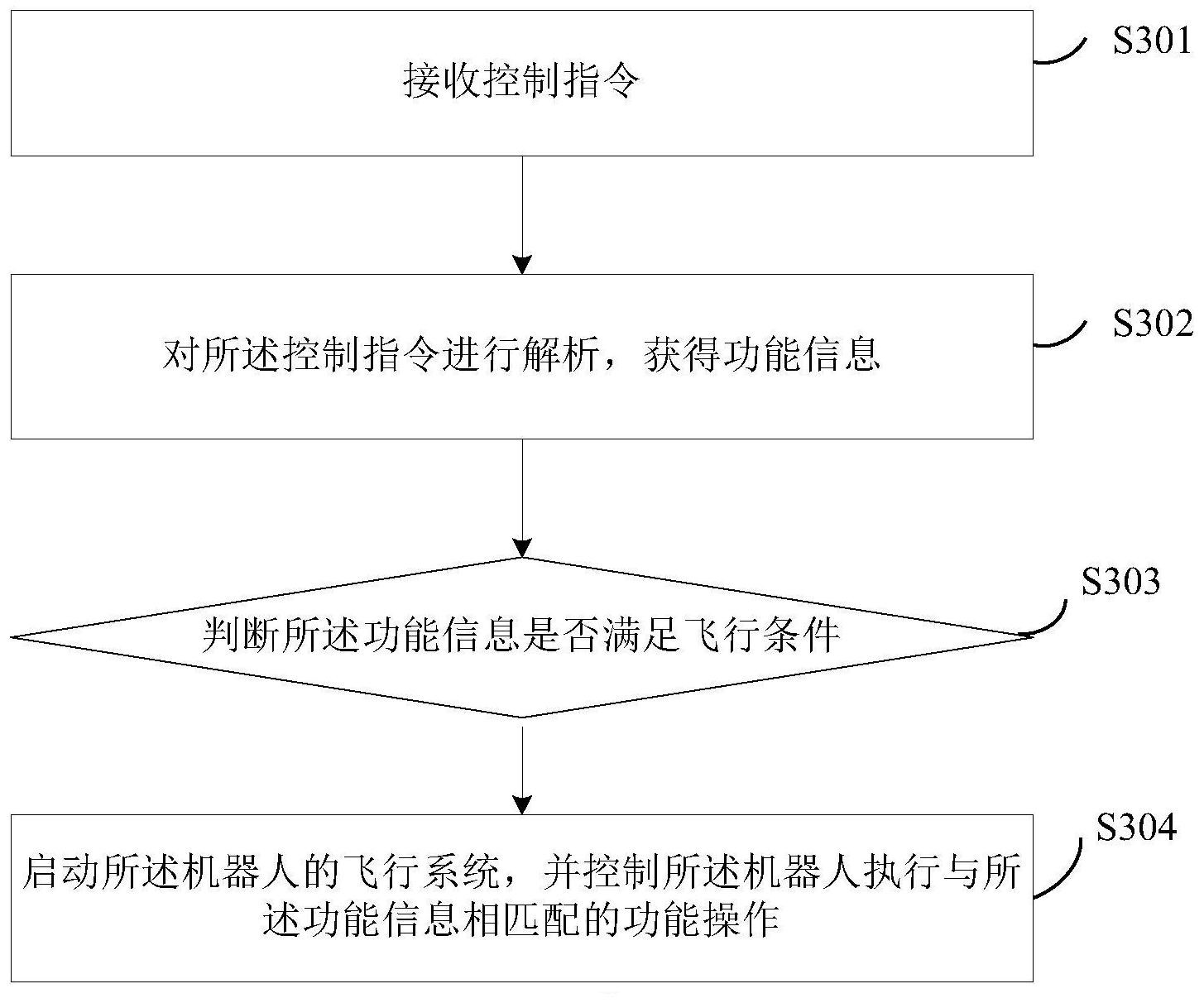
本发明公开了一种机器人及控制方法、系统,该控制方法包括:接收控制指令;对所述控制指令进行解析,获得功能信息,其中,所述功能信息用于指示机器人需要执行的功能;判断所述功能信息是否满足飞行条件,如果是,则启动所述机器人的飞行系统,并控制所述机器人执行与所述功能信息相匹配的功能操作。由于该机器人具有飞行系统能够在空中飞行,并且能够通过飞行执行多种功能操作,满足了多种使用环境的需求,解决了机器人使用环境受限的问题。
 chinappkf
客服微信号
chinappkf
客服微信号
 chinappsw
商务合作
chinappsw
商务合作
 品牌风云榜
关注公众号
品牌风云榜
关注公众号
CopyRight 2005-2026 品牌网 chinapp.com 版权所有