

授权公布号:CN107239822B
信息互动方法、系统及机器人
有效
申请
2017-06-09
申请公布
2017-10-10
授权
2020-12-15
预估到期
2037-06-09
| 申请号 | CN201710432549.1 |
| 申请日 | 2017-06-09 |
| 申请公布号 | CN107239822A |
| 申请公布日 | 2017-10-10 |
| 授权公布号 | CN107239822B |
| 授权公告日 | 2020-12-15 |
| 分类号 | G06N3/00;G06F3/0488;G06F3/16 |
| 分类 | 计算;推算;计数; |
| 申请人名称 | 上海思依暄机器人科技股份有限公司 |
| 申请人地址 | 中国(上海)自由贸易试验区芳春路400号1幢3层 |
专利法律状态
2020-12-15
授权
状态信息
授权
2018-01-05
著录事项变更
状态信息
著录事项变更;IPC(主分类):G06N3/00;变更事项:申请人;变更前:上海思依暄机器人科技股份有限公司;变更后:上海思依暄机器人科技股份有限公司;变更事项:地址;变更前:200233 上海市徐汇区桂平路680号(创业园)34号楼4楼F6室;变更后:201207 中国(上海)自由贸易试验区芳春路400号1幢3层
2017-11-07
实质审查的生效
状态信息
实质审查的生效;IPC(主分类):G06N3/00;申请日:20170609
2017-10-10
公布
状态信息
公布
摘要
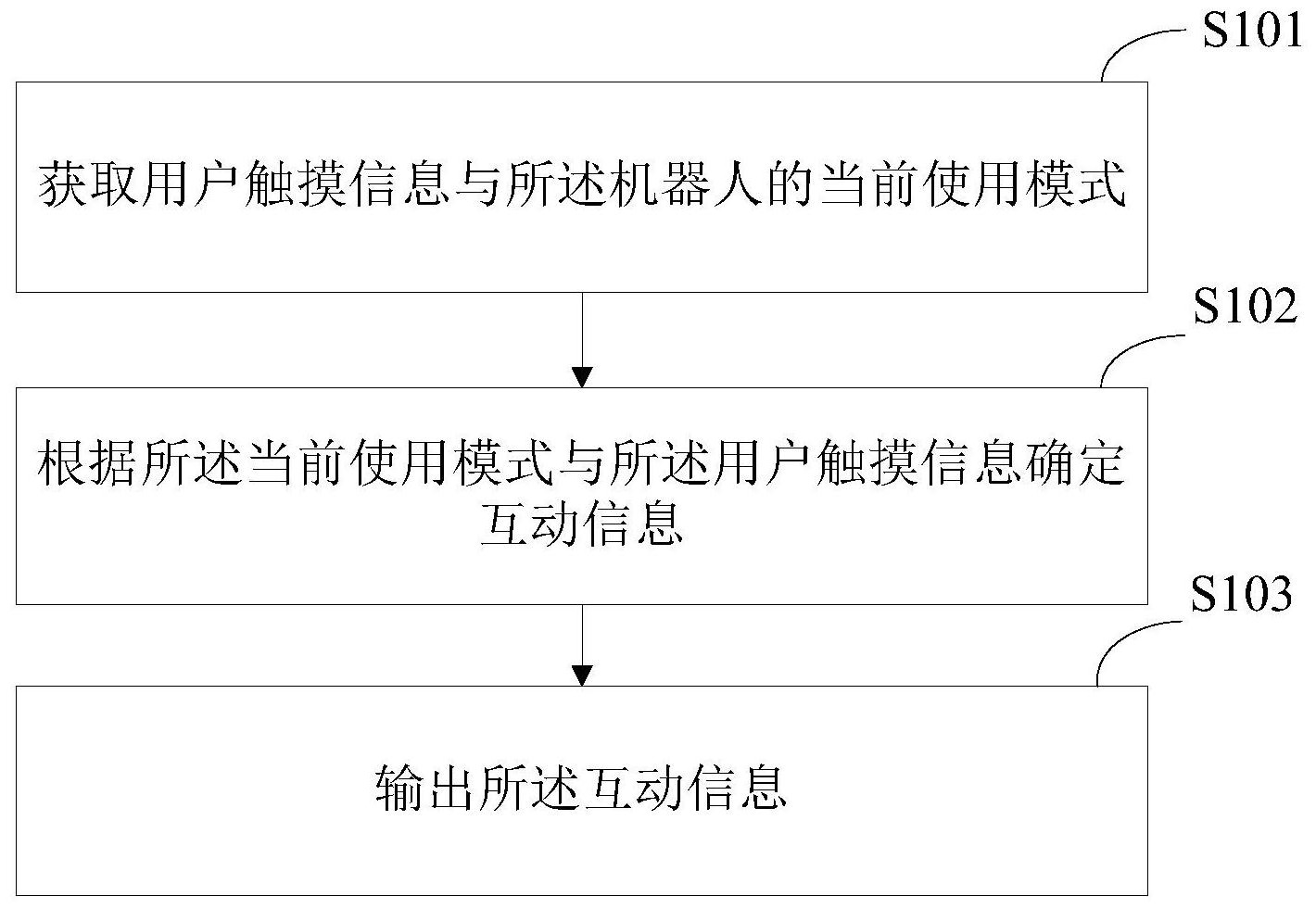
本发明提供了一种信息互动方法、系统及机器人,所述机器人具有多种使用模式,不同的使用模式对应于不同的使用场景,获取用户触摸信息与所述机器人的当前使用模式,根据所述当前使用模式与所述用户触摸信息确定互动信息,输出所述互动信息。所述互动信息不仅能够响应所述用户触摸信息,还能够与当前使用场景相适应,进而满足用户在不用使用场景下的不同使用需求。
 chinappkf
客服微信号
chinappkf
客服微信号
 chinappsw
商务合作
chinappsw
商务合作
 品牌风云榜
关注公众号
品牌风云榜
关注公众号
CopyRight 2005-2026 品牌网 chinapp.com 版权所有