

授权公布号:CN205749556U
机器人及机器人滚轮测速电路
有效
申请
2016-06-15
申请公布
1970-01-01
授权
2016-11-30
预估到期
2026-06-15
| 申请号 | CN201620582565.X |
| 申请日 | 2016-06-15 |
| 授权公布号 | CN205749556U |
| 授权公告日 | 2016-11-30 |
| 分类号 | G01P3/54 |
| 分类 | 测量;测试; |
| 申请人名称 | 上海思依暄机器人科技股份有限公司 |
| 申请人地址 | 上海市浦东新区中国(上海)自由贸易试验区芳春路400号1幢3层 |
专利法律状态
2018-01-09
专利权人的姓名或者名称、地址的变更
状态信息
专利权人的姓名或者名称、地址的变更;IPC(主分类):G01P3/54;变更事项:专利权人;变更前:上海思依暄机器人科技股份有限公司;变更后:上海思依暄机器人科技股份有限公司;变更事项:地址;变更前:200030 上海市徐汇区桂平路481号(桂中园)18号楼4楼F21-22室;变更后:201207 上海市浦东新区中国(上海)自由贸易试验区芳春路400号1幢3层
2016-11-30
授权
状态信息
授权
摘要
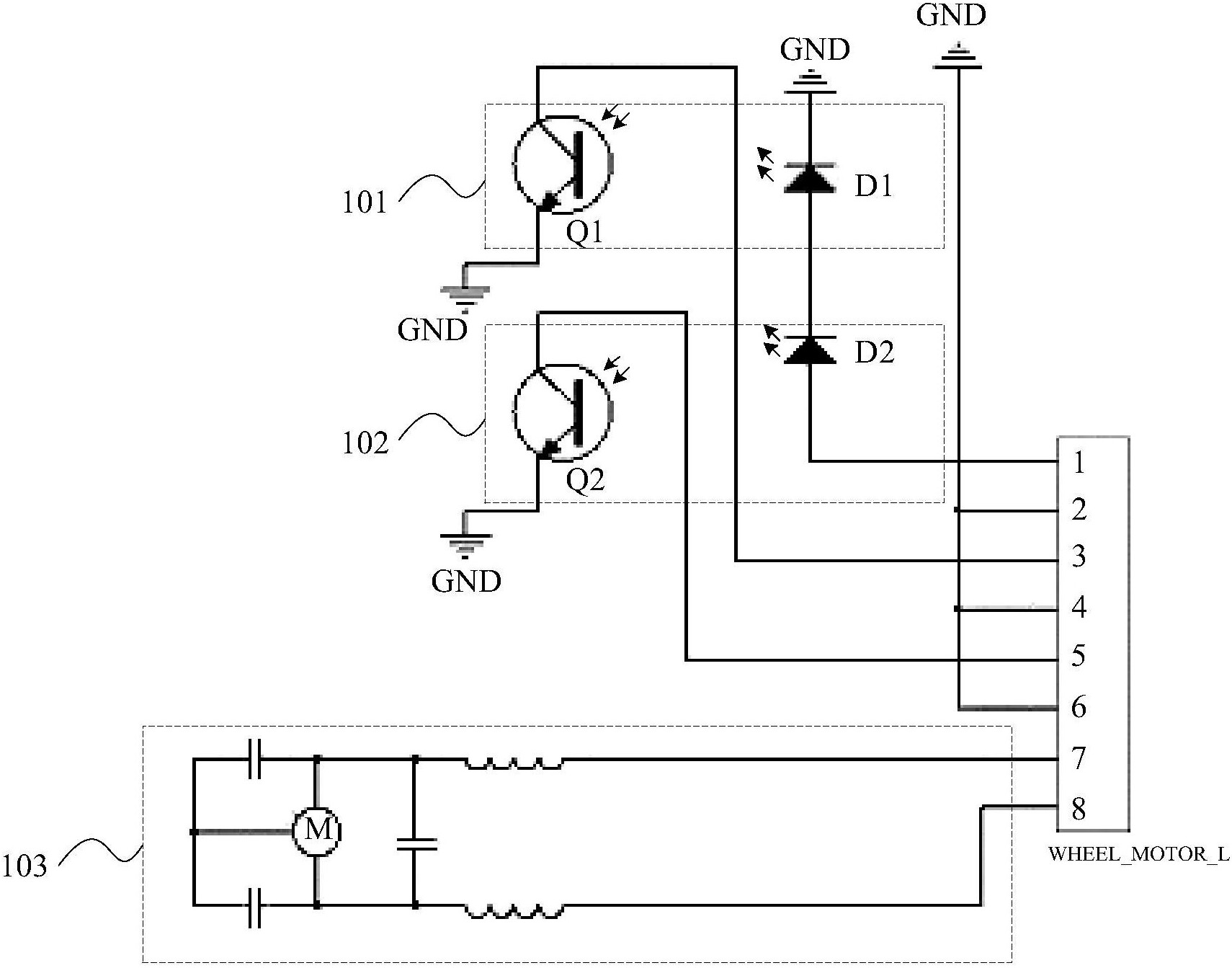
本实用新型公开了一种机器人滚轮测速电路,包括至少两组沿码盘主体周向相错设置的光电感应装置,所述光电感应装置包括分别设置于所述码盘主体光栅状开口两侧的发射装置和对应的接收装置,所述发射装置的第一输入端接地,第二输入端与电源连接;所述接收装置的输出端与控制器的输入端连接。应用本实用新型提供的机器人滚轮测速电路对机器人滚轮进行检测时,避免了以对应积灰或残缺的异常信号为依据判断待测部件的转动情况,有效规避了积灰或残缺造成的检测结果不准的问题。本实用新型还公开了一种包括上述机器人滚轮测速电路的机器人。
 chinappkf
客服微信号
chinappkf
客服微信号
 chinappsw
商务合作
chinappsw
商务合作
 品牌风云榜
关注公众号
品牌风云榜
关注公众号
CopyRight 2005-2026 品牌网 chinapp.com 版权所有