

授权公布号:CN107009371B
一种自动调节机器人舞蹈动作的方法及装置
有效
申请
2017-06-14
申请公布
2017-08-04
授权
2020-04-07
预估到期
2037-06-14
| 申请号 | CN201710448214.9 |
| 申请日 | 2017-06-14 |
| 申请公布号 | CN107009371A |
| 申请公布日 | 2017-08-04 |
| 授权公布号 | CN107009371B |
| 授权公告日 | 2020-04-07 |
| 分类号 | B25J11/00 |
| 分类 | 手动工具;轻便机动工具;手动器械的手柄;车间设备;机械手; |
| 申请人名称 | 上海思依暄机器人科技股份有限公司 |
| 申请人地址 | 中国(上海)自由贸易试验区芳春路400号1幢3层 |
专利法律状态
2020-04-07
授权
状态信息
授权
2018-01-05
著录事项变更
状态信息
著录事项变更;IPC(主分类):B25J11/00;变更事项:申请人;变更前:上海思依暄机器人科技股份有限公司;变更后:上海思依暄机器人科技股份有限公司;变更事项:地址;变更前:200233 上海市徐汇区桂平路680号(创业园)34号楼4楼F6室;变更后:201207 中国(上海)自由贸易试验区芳春路400号1幢3层
2017-08-29
实质审查的生效
状态信息
实质审查的生效;IPC(主分类):B25J11/00;申请日:20170614
2017-08-04
公布
状态信息
公布
摘要
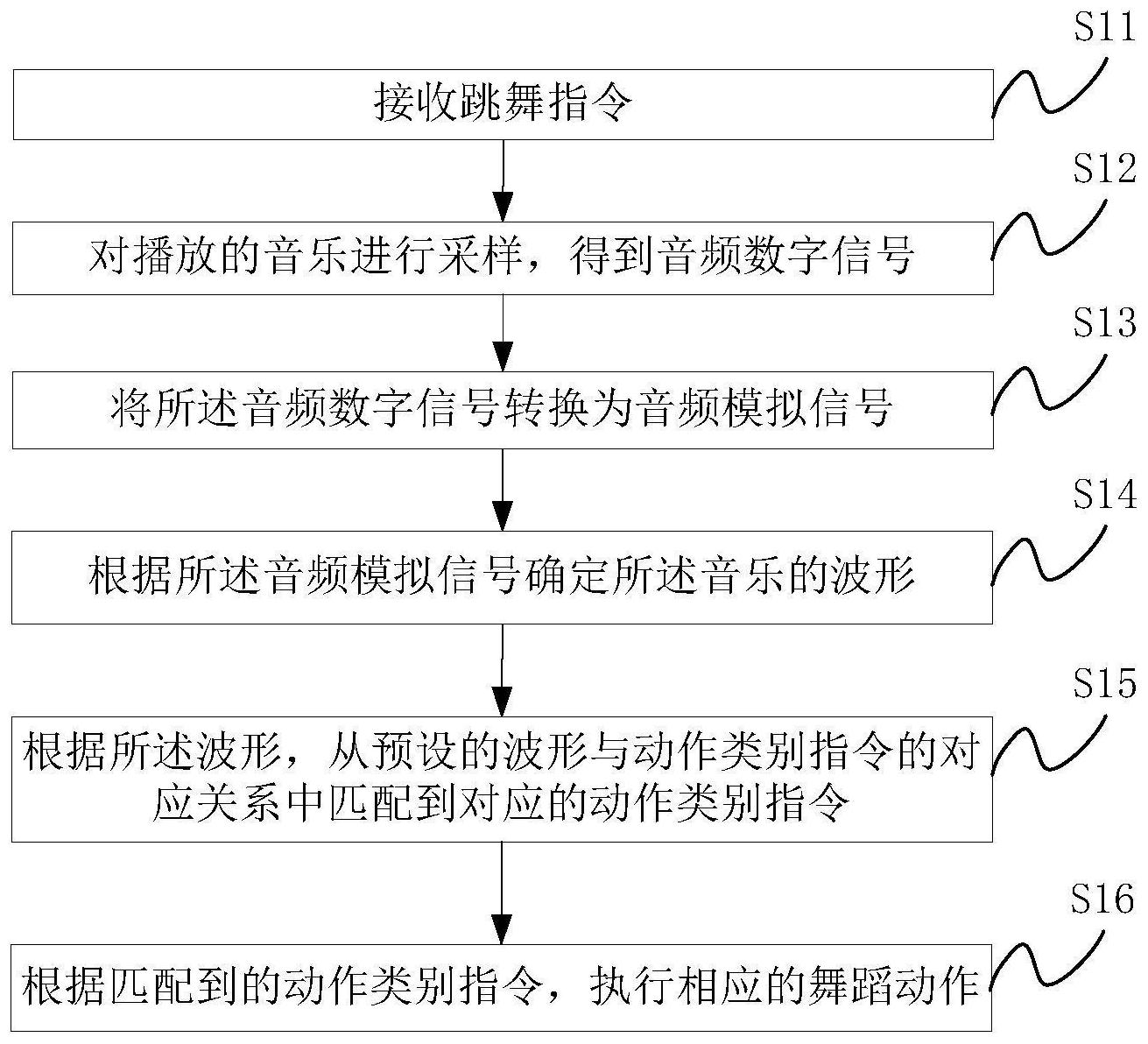
本发明公开的一种自动调节机器人舞蹈动作的方法及装置,获取播放的音乐的波形,然后根据预设的波形与动作类别指令的对应关系,得到播放的音乐对应的动作类别指令,动作类别指令为多个基本动作指令的组合,根据动作类别指令,执行相应的舞蹈动作。机器人随着播放音乐的不同可以自主表演不同的舞蹈动作,实现机器人根据不同的音乐进行不同舞蹈动作表演,改善了用户体验。
 chinappkf
客服微信号
chinappkf
客服微信号
 chinappsw
商务合作
chinappsw
商务合作
 品牌风云榜
关注公众号
品牌风云榜
关注公众号
CopyRight 2005-2026 品牌网 chinapp.com 版权所有