

授权公布号:CN107356252B
一种融合视觉里程计与物理里程计的室内机器人定位方法
有效
申请
2017-06-02
申请公布
2017-11-17
授权
2020-06-16
预估到期
2037-06-02
| 申请号 | CN201710408258.9 |
| 申请日 | 2017-06-02 |
| 申请公布号 | CN107356252A |
| 申请公布日 | 2017-11-17 |
| 授权公布号 | CN107356252B |
| 授权公告日 | 2020-06-16 |
| 分类号 | G01C21/20 |
| 分类 | 测量;测试; |
| 申请人名称 | 青岛克路德机器人有限公司 |
| 申请人地址 | 山东省青岛市胶州市经济技术开发区尚德大道以东、汾河路以南 |
专利法律状态
2020-06-16
授权
状态信息
授权
2017-12-12
实质审查的生效
状态信息
实质审查的生效IPC(主分类):G01C 21/20申请日:20170602
2017-11-17
公布
状态信息
公布
摘要
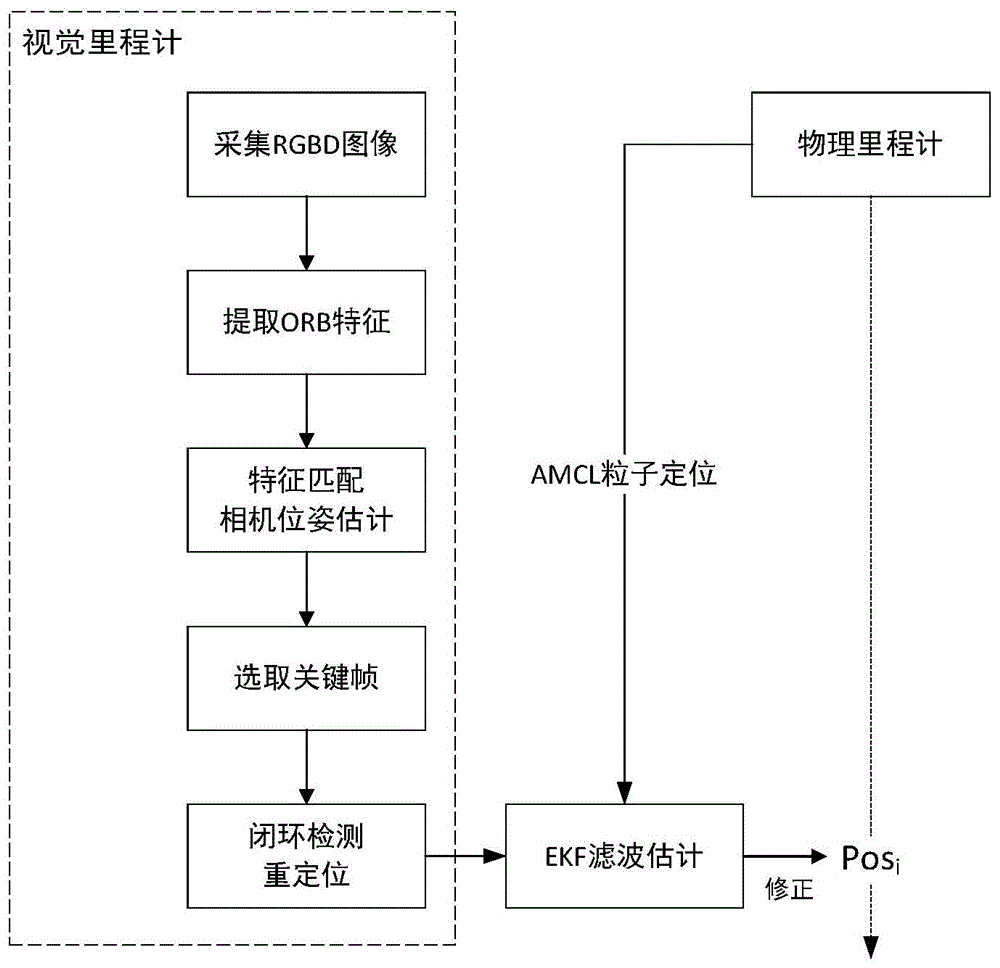
本发明公开了一种融合视觉里程计与物理里程计的室内机器人定位方法,通过采集的图像提取ORB特征进行图像匹配、相机位姿估计、闭环检测精确定位机器人。本发明加入了视觉传感器在已知环境中对机器人进行闭环检测,以此消除基于粒子滤波的物理里程计在全局中的累计误差,把里程计的全局误差变为了阶段性的累加,并在此基础上构建了闭合的地图。本发明融合视觉里程计后有效解决物理里程计误差累计问题,能使机器人在已知环境中进行自定位和精确重定位,且增加的运算量不大,能保证效率和实时性,精度满足室内导航需求,是现阶段解决大环境下机器人定位不准的有效方法。
 chinappkf
客服微信号
chinappkf
客服微信号
 chinappsw
商务合作
chinappsw
商务合作
 品牌风云榜
关注公众号
品牌风云榜
关注公众号
CopyRight 2005-2026 品牌网 chinapp.com 版权所有