

授权公布号:CN109965797B
扫地机器人地图的生成方法、扫地机器人控制方法及终端
有效
申请
2019-03-20
申请公布
2019-07-05
授权
2021-08-24
预估到期
2039-03-20
| 申请号 | CN201910214074.8 |
| 申请日 | 2019-03-20 |
| 申请公布号 | CN109965797A |
| 申请公布日 | 2019-07-05 |
| 授权公布号 | CN109965797B |
| 授权公告日 | 2021-08-24 |
| 分类号 | A47L11/40;A47L11/24 |
| 分类 | 家具;家庭用的物品或设备;咖啡磨;香料磨;一般吸尘器; |
| 申请人名称 | 深圳市愚公科技有限公司 |
| 申请人地址 | 广东省深圳市南山区粤海街道滨海社区科园路1002号A8音乐大厦22层03室 |
专利法律状态
2021-08-24
授权
状态信息
授权
2019-07-30
实质审查的生效
状态信息
实质审查的生效IPC(主分类):A47L 11/40
2019-07-05
公布
状态信息
公布
摘要
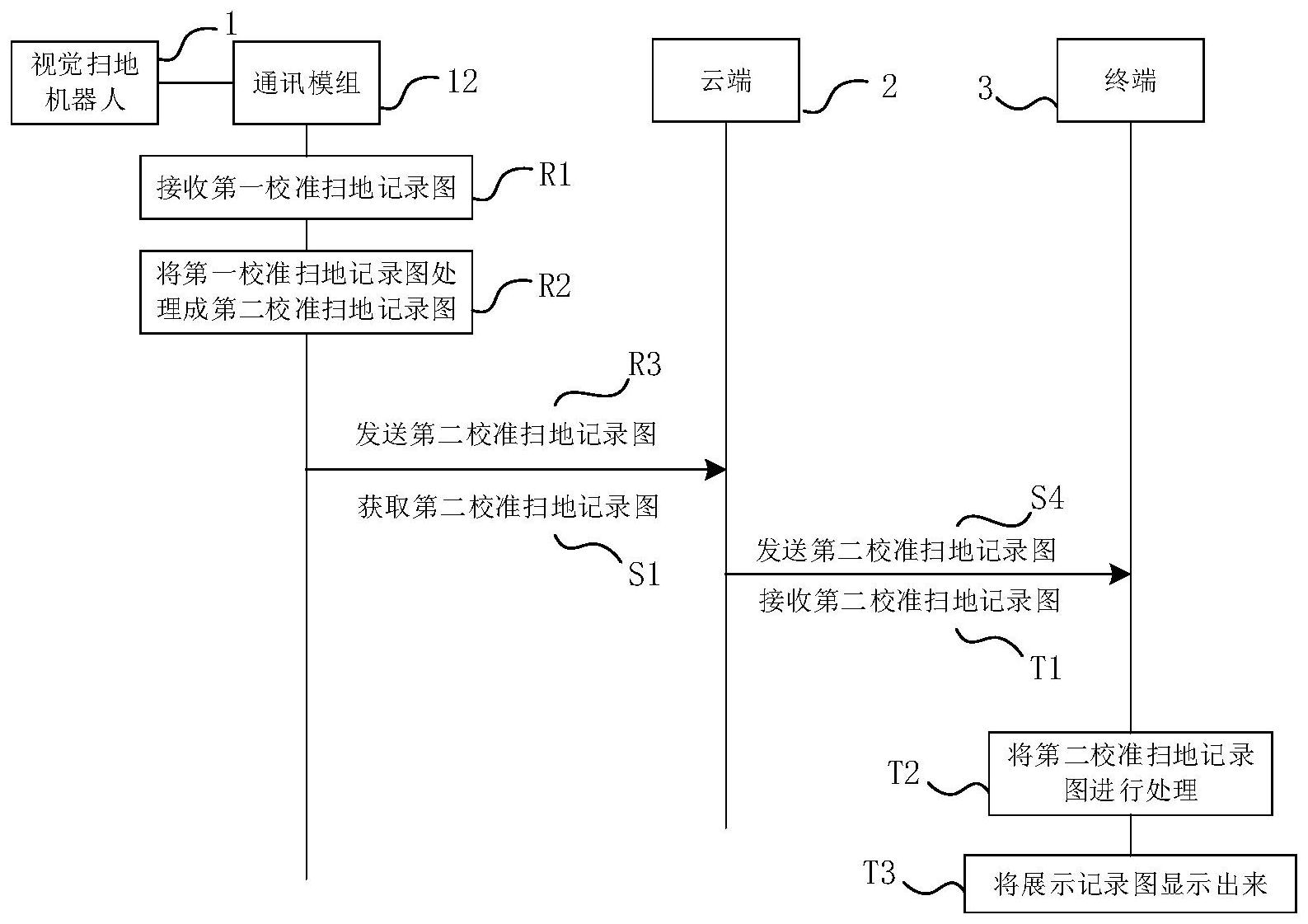
本发明公开了一种扫地机器人地图的生成方法,包括:终端或云端接收来自扫地机器人的通讯模组对第一校准扫地记录图进行转换处理形成的第二校准扫地记录图。第二校准扫地记录图所占存储空间的大小小于第一校准扫地记录图。终端或云端将第二校准扫地记录图进行处理,使其中的已扫区域的轮廓凸显出来,得到展示记录图以进行显示。本发明还涉及扫地机器人的控制方法,包括接收用户在显示出来的凸显轮廓的图上的操作指示,形成操作指令以对扫地机器人进行控制。本发明还涉及一种可执行所述控制方法的终端。如此,用户便可看到扫地机器人所处的当前清扫区域的被凸显出来的轮廓,也就可在凸显轮廓的图上操作。
 chinappkf
客服微信号
chinappkf
客服微信号
 chinappsw
商务合作
chinappsw
商务合作
 品牌风云榜
关注公众号
品牌风云榜
关注公众号
CopyRight 2005-2026 品牌网 chinapp.com 版权所有