

授权公布号:CN206296927U
一种机械手吸盘架快速拆装结构
有效
申请
2016-12-09
申请公布
1970-01-01
授权
2017-07-04
预估到期
2026-12-09
| 申请号 | CN201621354717.7 |
| 申请日 | 2016-12-09 |
| 授权公布号 | CN206296927U |
| 授权公告日 | 2017-07-04 |
| 分类号 | B25J15/04 |
| 分类 | 手动工具;轻便机动工具;手动器械的手柄;车间设备;机械手; |
| 申请人名称 | 中山市汉德机器人有限公司 |
| 申请人地址 | 广东省中山市火炬开发区九沙路6号1幢一层 |
专利法律状态
2017-07-04
授权
状态信息
授权
摘要
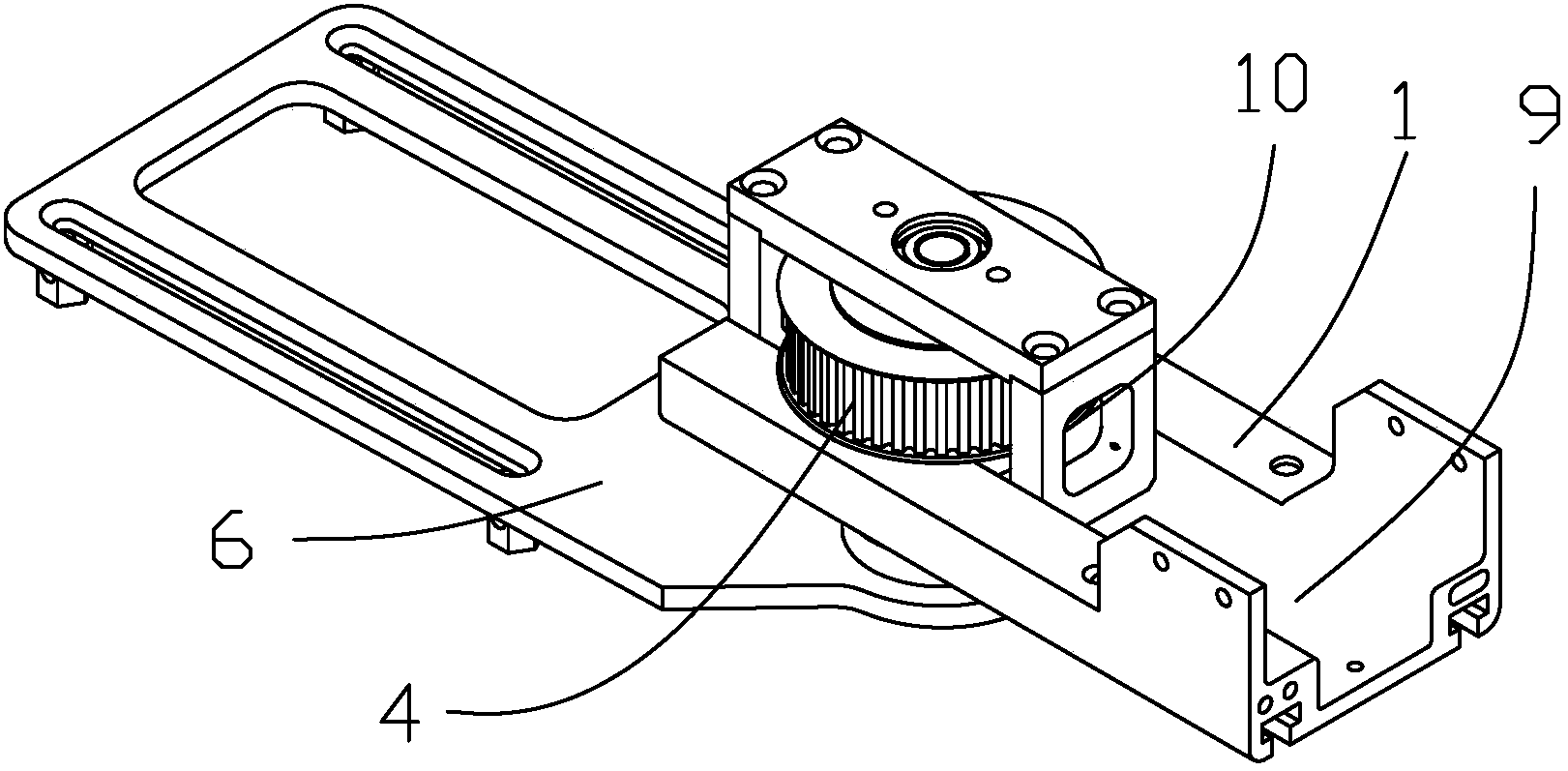
本实用新型公开了一种机械手吸盘架快速拆装结构,包括手臂机设置于手臂上的支撑架,支撑架内设有校正轴,该校正轴通过轴承座安装于支撑架上,该校正轴上设有与驱动单元连接的带轮,校正轴的端部安装有校正盘,校正盘上安装有抓板,且该抓板与校正盘间设有能够给抓板角度定位的定位机构,本实用新型在更换抓板时,预先可通过定位机构预定抓板的安装角度,再通过螺钉锁定,因而可以保证每块抓板在安装后都保持同一安装角度,避免安装角度不同导致抓取工件后工件的摆放位置不同。
 chinappkf
客服微信号
chinappkf
客服微信号
 chinappsw
商务合作
chinappsw
商务合作
 品牌风云榜
关注公众号
品牌风云榜
关注公众号
CopyRight 2005-2026 品牌网 chinapp.com 版权所有