

授权公布号:CN115857502B
行驶控制方法和电子设备
有效
申请
2022-11-30
申请公布
2023-03-28
授权
2023-12-12
预估到期
2042-11-30
| 申请号 | CN202211527498.8 |
| 申请日 | 2022-11-30 |
| 申请公布号 | CN115857502A |
| 申请公布日 | 2023-03-28 |
| 授权公布号 | CN115857502B |
| 授权公告日 | 2023-12-12 |
| 分类号 | G05D1/02 |
| 分类 | 控制;调节; |
| 申请人名称 | 上海木蚁机器人科技有限公司 |
| 申请人地址 | 上海市浦东新区中国(上海)自由贸易试验区郭守敬路351号2号楼A685-24室 |
专利法律状态
2023-12-12
授权
状态信息
授权
2023-03-28
公布
状态信息
公布
摘要
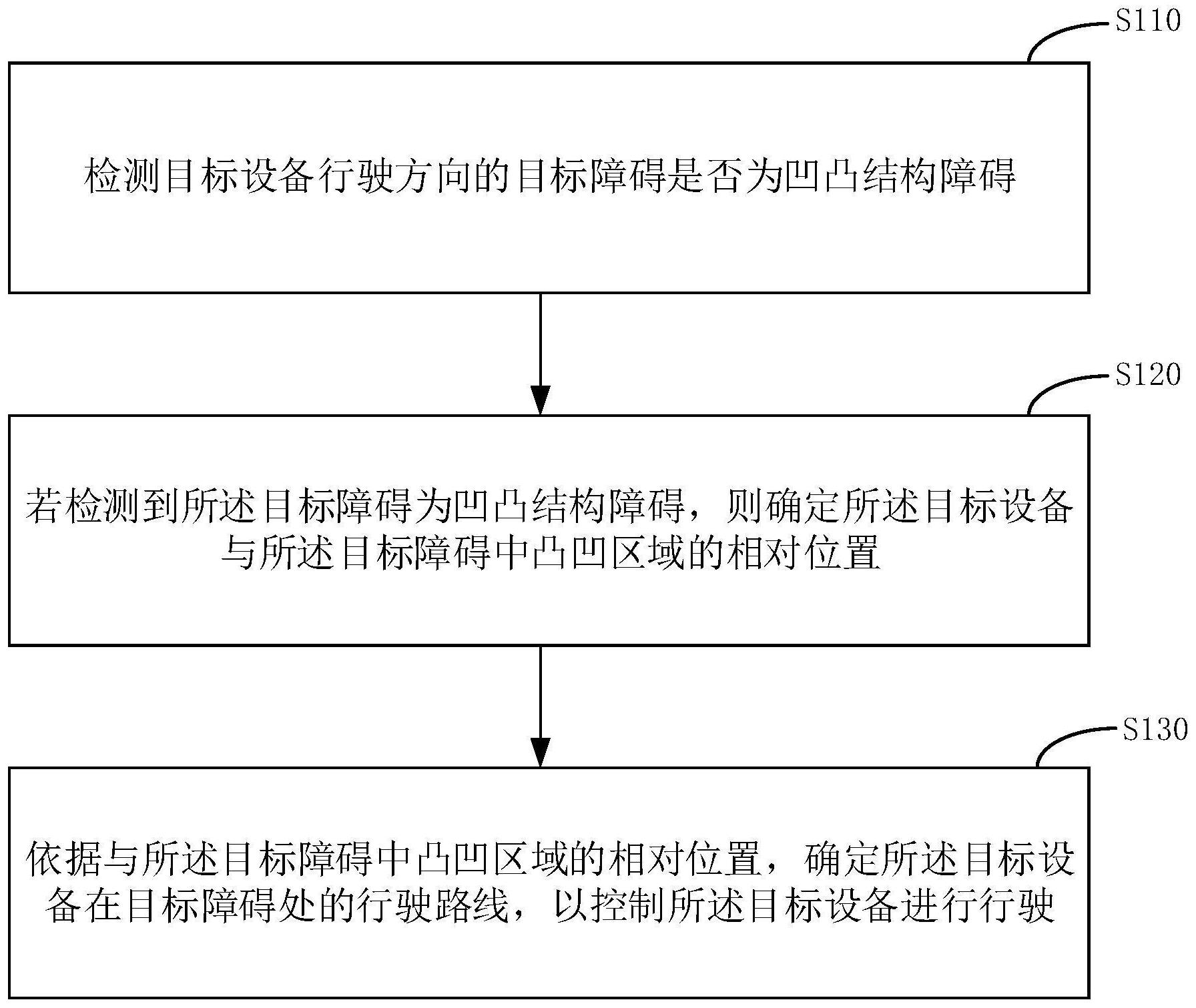
本发明公开了一种行驶控制方法和电子设备。该方法包括:检测目标设备行驶方向的目标障碍是否为凹凸结构障碍;若检测到所述目标障碍为凹凸结构障碍,则确定所述目标设备与所述目标障碍中凸凹区域的相对位置;依据与所述目标障碍中凸凹区域的相对位置,确定所述目标设备在目标障碍处的行驶路线,以控制所述目标设备进行行驶。本申请技术方案通过确定目标设备行驶方向的目标障碍为凹凸结构障碍,同时根据精确确定的目标障碍中凸凹区域的相对位置,获取目标设备在目标障碍处的准确行驶路线,解决了因障碍位置表征不准确导致无法在有限区域进行行驶控制的问题,提高了对目标设备行驶路线规划的准确性。
 chinappkf
客服微信号
chinappkf
客服微信号
 chinappsw
商务合作
chinappsw
商务合作
 品牌风云榜
关注公众号
品牌风云榜
关注公众号
CopyRight 2005-2026 品牌网 chinapp.com 版权所有