

授权公布号:CN115437385B
移动机器人的激光定位方法、装置、设备和介质
有效
申请
2022-10-21
申请公布
2022-12-06
授权
2023-06-23
预估到期
2042-10-21
| 申请号 | CN202211294073.7 |
| 申请日 | 2022-10-21 |
| 申请公布号 | CN115437385A |
| 申请公布日 | 2022-12-06 |
| 授权公布号 | CN115437385B |
| 授权公告日 | 2023-06-23 |
| 分类号 | G05D1/02;G01S17/89;G01C21/20 |
| 分类 | 控制;调节; |
| 申请人名称 | 上海木蚁机器人科技有限公司 |
| 申请人地址 | 上海市浦东新区中国(上海)自由贸易试验区郭守敬路351号2号楼A685-24室 |
专利法律状态
2023-06-23
授权
状态信息
授权
2022-12-23
实质审查的生效
状态信息
实质审查的生效;IPC(主分类):G05D1/02;申请日:20221021
2022-12-06
公布
状态信息
公布
摘要
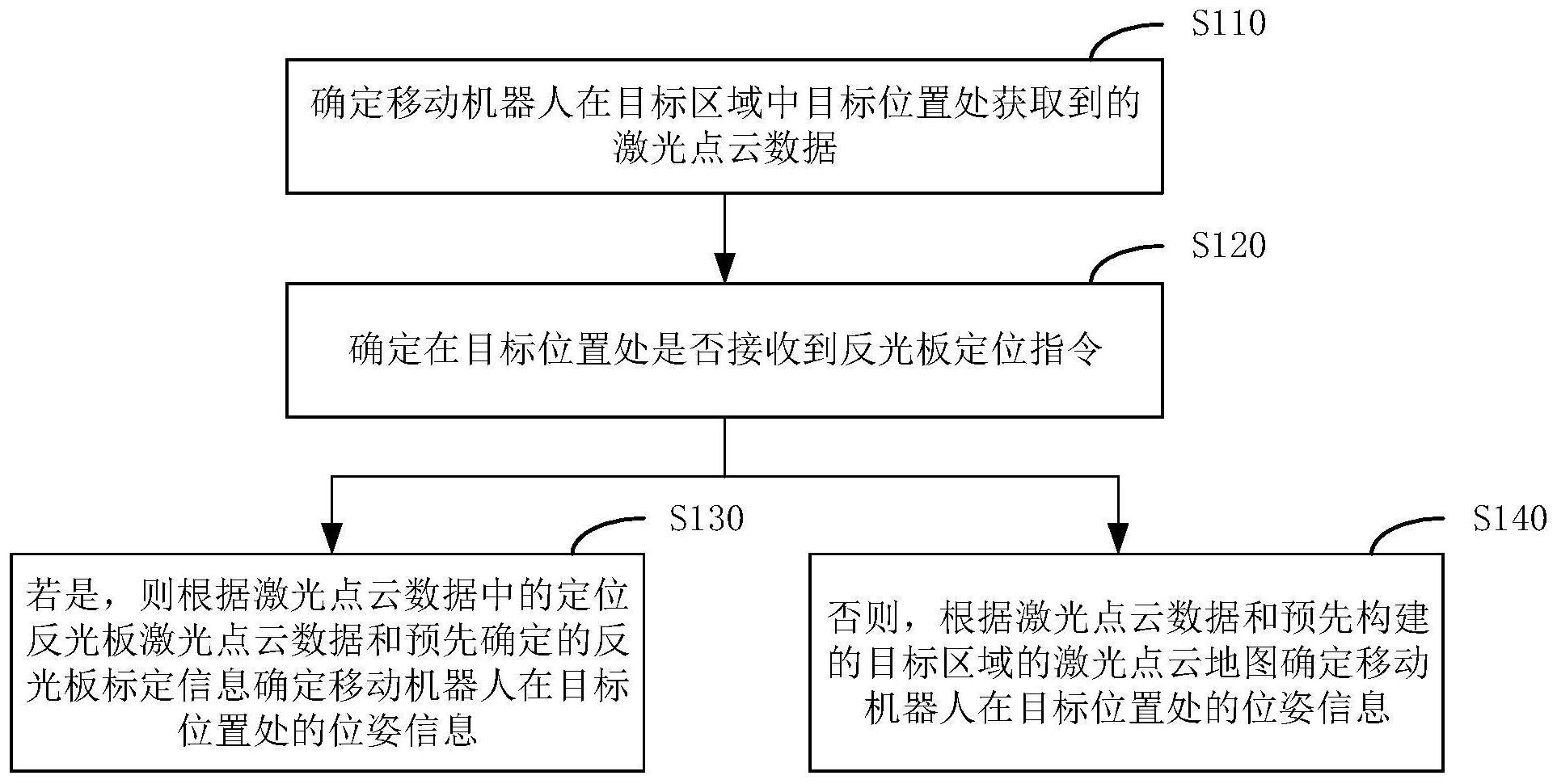
本发明实施例公开了一种移动机器人的激光定位方法、装置、设备和介质。该方法包括:确定移动机器人在目标区域中目标位置处获取到的激光点云数据;确定在目标位置处是否接收到反光板定位指令;若是,则根据激光点云数据中的定位反光板激光点云数据和预先确定的反光板标定信息确定移动机器人在目标位置处的位姿信息;否则,根据激光点云数据和预先构建的目标区域的激光点云地图确定移动机器人在目标位置处的位姿信息。本技术方案,对于定位精度要求较高的场景能够有效提升激光定位精度,对于定位精度要求不高的场景沿用激光点云匹配算法,无需大规模铺设反光板,降低了计算成本和经济成本,提高了激光定位效率,从而更好地满足实际需求。
 chinappkf
客服微信号
chinappkf
客服微信号
 chinappsw
商务合作
chinappsw
商务合作
 品牌风云榜
关注公众号
品牌风云榜
关注公众号
CopyRight 2005-2026 品牌网 chinapp.com 版权所有