

授权公布号:CN111949021B
自走式机器人及其控制方法
有效
申请
2020-07-30
申请公布
2020-11-17
授权
2024-02-09
预估到期
2040-07-30
| 申请号 | CN202010747842.9 |
| 申请日 | 2020-07-30 |
| 申请公布号 | CN111949021A |
| 申请公布日 | 2020-11-17 |
| 授权公布号 | CN111949021B |
| 授权公告日 | 2024-02-09 |
| 分类号 | G05D1/43;G05D1/242;G05D1/243;G05D1/644;G05D1/247;G05D1/648;A47L11/24;A47L11/40;G05D105/10N |
| 分类 | 控制;调节; |
| 申请人名称 | 尚科宁家(中国)科技有限公司 |
| 申请人地址 | 浙江省杭州市经济技术开发区泰美国际大厦1幢2301室 |
专利法律状态
2024-02-09
授权
状态信息
授权
2020-12-04
实质审查的生效
状态信息
实质审查的生效;IPC(主分类):G05D1/02;申请日:20200730
2020-11-17
公布
状态信息
公布
摘要
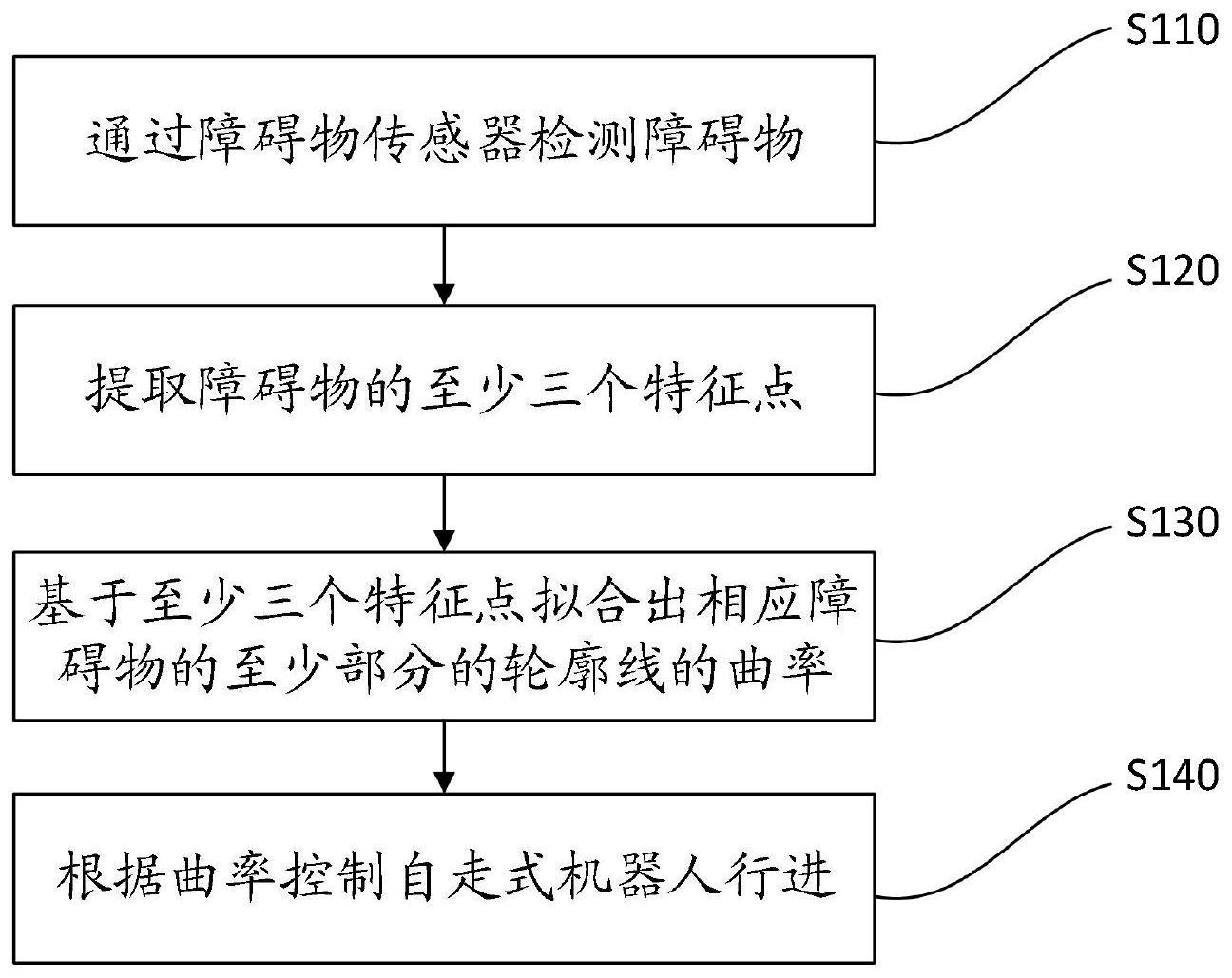
本公开提供了一种自走式机器人的控制方法,该自走式机器人设置有障碍物传感器,所述控制方法包括:通过所述障碍物传感器检测障碍物;提取所述障碍物的至少三个特征点;基于所述至少三个特征点拟合出相应障碍物的至少部分的轮廓线的曲率;根据所述曲率控制所述自走式机器人行进。本公开的上述控制方法能够使得自走式机器人及时获取障碍物的曲率,进而使自走式机器人能够判断出障碍物上是否存在凸起和凹陷,进而使得自走式机器人能够做出相应的策略,防止自走式机器人碰撞到障碍物上的凸起。
 chinappkf
客服微信号
chinappkf
客服微信号
 chinappsw
商务合作
chinappsw
商务合作
 品牌风云榜
关注公众号
品牌风云榜
关注公众号
CopyRight 2005-2026 品牌网 chinapp.com 版权所有