

授权公布号:CN116117796B
一种工业机器人姿态轨迹过渡与速度规划方法及系统
有效
申请
2022-12-19
申请公布
2023-05-16
授权
2024-02-27
预估到期
2042-12-19
| 申请号 | CN202211629309.8 |
| 申请日 | 2022-12-19 |
| 申请公布号 | CN116117796A |
| 申请公布日 | 2023-05-16 |
| 授权公布号 | CN116117796B |
| 授权公告日 | 2024-02-27 |
| 分类号 | B25J9/16 |
| 分类 | 手动工具;轻便机动工具;手动器械的手柄;车间设备;机械手; |
| 申请人名称 | 广州数控设备有限公司 |
| 申请人地址 | 广东省广州市萝岗区观达路22号 |
专利法律状态
2024-02-27
授权
状态信息
授权
2023-06-02
实质审查的生效
状态信息
实质审查的生效;IPC(主分类):B25J9/16;申请日:20221219
2023-05-16
公布
状态信息
公布
摘要
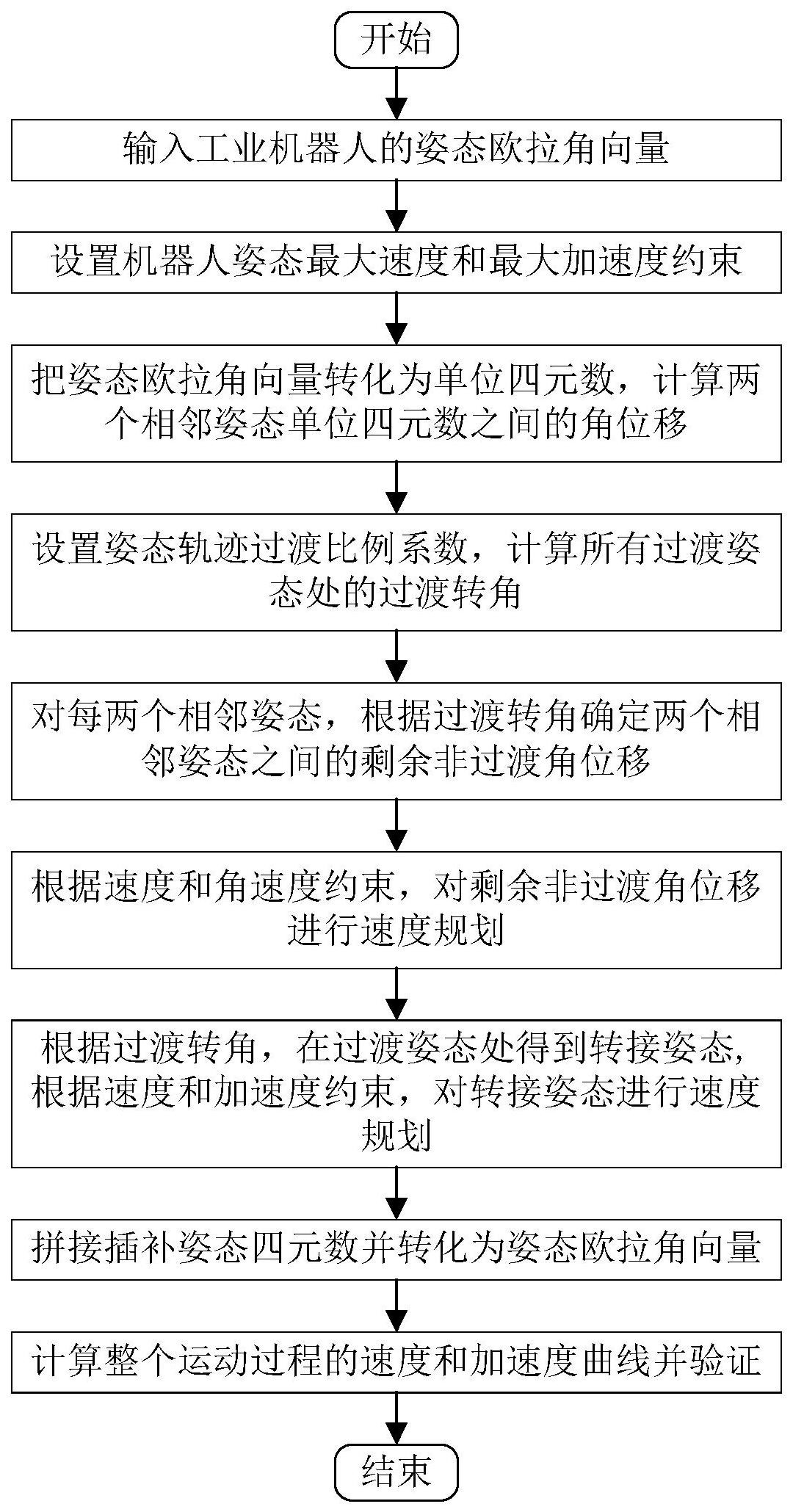
本发明属于工业机器人轨迹规划领域,为工业机器人姿态轨迹过渡与速度规划方法及系统,其方法包括:把姿态欧拉角向量转化为单位四元数,计算相邻姿态单位四元数之间的角位移;根据姿态轨迹过渡比例系数和角位移,计算所有过渡姿态处的过渡转角;确定两个相邻姿态之间的剩余非过渡角位移;对剩余非过渡角位移进行速度规划;在过渡姿态处拟合得到转接姿态,对转接姿态进行速度规划;拼接非过渡段和过渡段规划后的姿态四元数,转化为姿态欧拉角向量,得到姿态轨迹插补命令;计算运动过程的速度和加速度曲线,验证是否满足最大速度和加速度约束。本发明实现了速度和加速度约束下的姿态转接速度平滑过渡,缩短了姿态频繁变化时的运动时间。
 chinappkf
客服微信号
chinappkf
客服微信号
 chinappsw
商务合作
chinappsw
商务合作
 品牌风云榜
关注公众号
品牌风云榜
关注公众号
CopyRight 2005-2026 品牌网 chinapp.com 版权所有