

授权公布号:CN115008476B
基于等效运动学模型的机器人标定方法及设备
有效
申请
2022-08-09
申请公布
2022-09-06
授权
2022-12-13
预估到期
2042-08-09
| 申请号 | CN202210946892.9 |
| 申请日 | 2022-08-09 |
| 申请公布号 | CN115008476A |
| 申请公布日 | 2022-09-06 |
| 授权公布号 | CN115008476B |
| 授权公告日 | 2022-12-13 |
| 分类号 | B25J9/16 |
| 分类 | 手动工具;轻便机动工具;手动器械的手柄;车间设备;机械手; |
| 申请人名称 | 广州数控设备有限公司 |
| 申请人地址 | 天津市南开区卫津路92号 |
专利法律状态
2023-02-17
专利权人的姓名或者名称、地址的变更
状态信息
专利权人的姓名或者名称、地址的变更;IPC(主分类):B25J9/16;变更事项:专利权人;变更前:广州数控设备有限公司;变更后:天津大学;变更事项:地址;变更前:510000 广东省广州市黄埔区观达路22号;变更后:300110 天津市南开区卫津路92号;变更事项:专利权人;变更前:天津大学;变更后:广州数控设备有限公司
2022-12-13
授权
状态信息
授权
2022-09-23
实质审查的生效
状态信息
实质审查的生效;IPC(主分类):B25J9/16;申请日:20220809
2022-09-06
公布
状态信息
公布
摘要
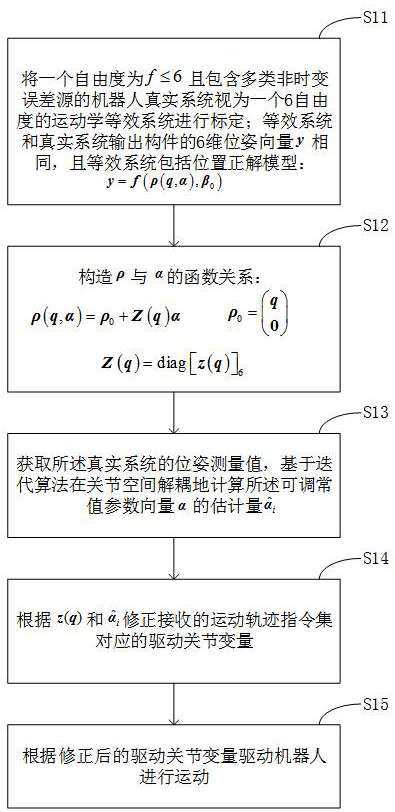
本申请涉及一种基于等效运动学模型的机器人标定方法及设备,方法包括:将一个自由度为且包含多类非时变误差源的机器人真实系统视为一个6自由度的运动学等效系统进行标定;等效系统和真实系统输出构件的6维位姿向量相同,且等效系统包括位置正解模型:;其中,为已知的真实系统运动学参数的名义值,为等效系统的全关节变量,为真实系统的驱动关节变量,为可调常值参数向量。构造与的函数关系,获取真实系统的位姿测量值,基于迭代算法在关节空间解耦地计算可调常值参数向量的估计量,根据的函数结构和修正接收的运动轨迹指令集对应的驱动关节变量,根据修正后的驱动关节变量驱动机器人进行运动。
 chinappkf
客服微信号
chinappkf
客服微信号
 chinappsw
商务合作
chinappsw
商务合作
 品牌风云榜
关注公众号
品牌风云榜
关注公众号
CopyRight 2005-2026 品牌网 chinapp.com 版权所有