

授权公布号:CN111099462B
一种智能机器人乘坐电梯控制方法及系统
有效
申请
2018-10-26
申请公布
2020-05-05
授权
2022-02-01
预估到期
2038-10-26
| 申请号 | CN201811261778.2 |
| 申请日 | 2018-10-26 |
| 申请公布号 | CN111099462A |
| 申请公布日 | 2020-05-05 |
| 授权公布号 | CN111099462B |
| 授权公告日 | 2022-02-01 |
| 分类号 | B66B1/06;B66B5/00;B66B1/34 |
| 分类 | 卷扬;提升;牵引; |
| 申请人名称 | 深圳市旺龙智能科技有限公司 |
| 申请人地址 | 广东省深圳市南山区学苑大道1001号南山智园C1栋12层 |
专利法律状态
2022-02-01
授权
状态信息
授权
2020-05-05
公布
状态信息
公布
摘要
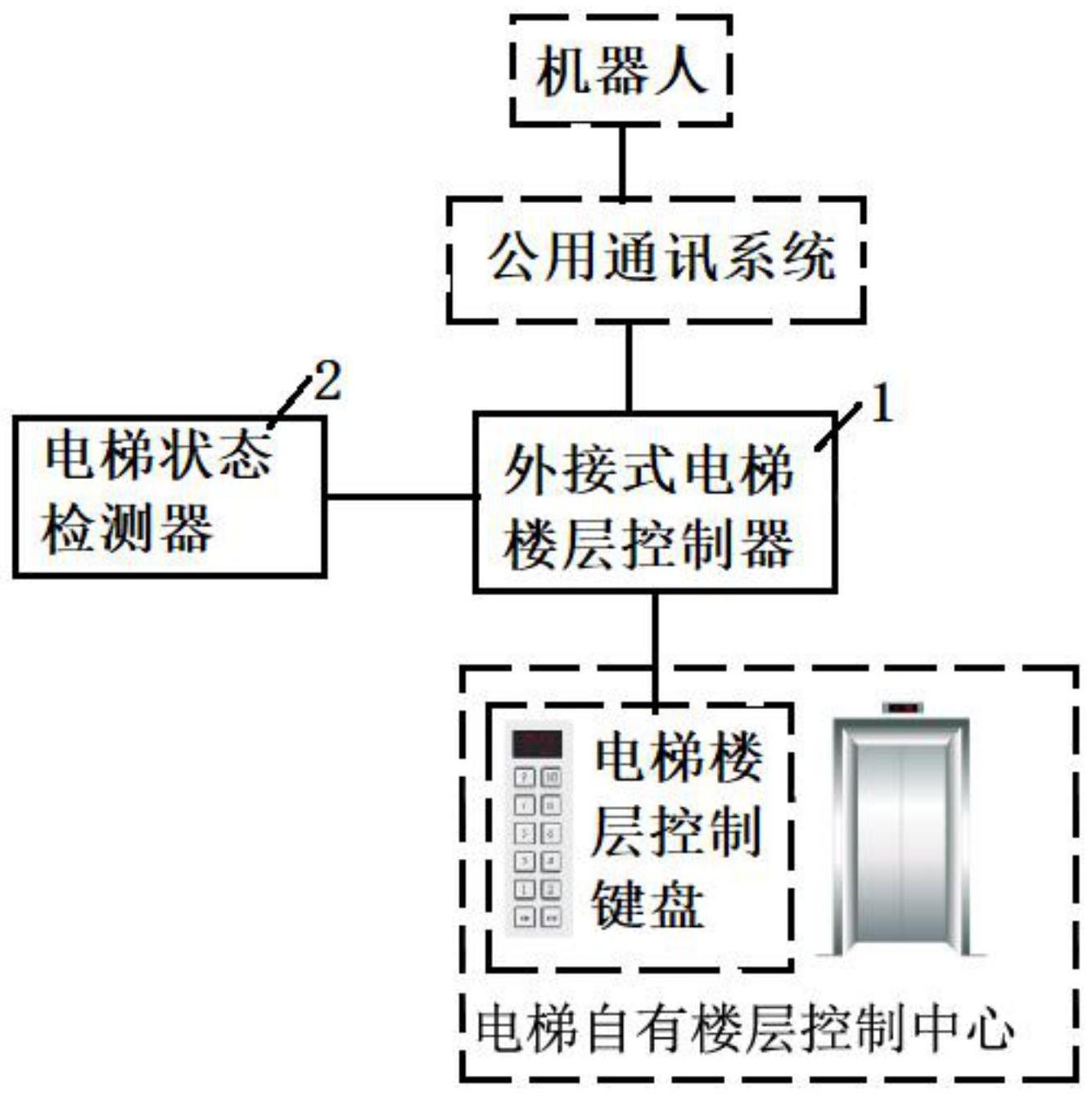
本发明涉及一种的机器人乘坐电梯控制方法及系统,所述机器人乘坐电梯控制系统是在电梯原有的电梯控制系统之外设置的,与电梯控制系统隔离,通过加入“电梯状态检测器”和“外接式电梯楼层控制器”,将机器人乘梯指令通过“外接式电梯楼层控制器”传给电梯的控制系统,而将电梯的状态通过电梯状态检测器传给机器人,这样,在不对电梯原有控制系统做改动的情况下,实现机器人的顺利乘梯,不会对电梯厂家带来任何安全压力,也无需机器人方案公司做出复杂的适应不同电梯的设置。其通用性更强,能适应多种机器人及多种电梯。
 chinappkf
客服微信号
chinappkf
客服微信号
 chinappsw
商务合作
chinappsw
商务合作
 品牌风云榜
关注公众号
品牌风云榜
关注公众号
CopyRight 2005-2026 品牌网 chinapp.com 版权所有