

授权公布号:CN107307949B
载人机器人
有效
申请
2017-08-18
申请公布
2017-11-03
授权
2023-08-01
预估到期
2037-08-18
| 申请号 | CN201710713687.7 |
| 申请日 | 2017-08-18 |
| 申请公布号 | CN107307949A |
| 申请公布日 | 2017-11-03 |
| 授权公布号 | CN107307949B |
| 授权公告日 | 2023-08-01 |
| 分类号 | A61G5/04;A61G5/06;A61G5/10;A61G5/08 |
| 分类 | 医学或兽医学;卫生学; |
| 申请人名称 | 常州爱尔威智能科技有限公司 |
| 申请人地址 | 江苏省常州市新北区科五路高新科技园10号楼东楼5楼 |
专利法律状态
2023-08-01
授权
状态信息
授权
2018-04-06
专利申请权、专利权的转移
状态信息
专利申请权的转移;IPC(主分类):A61G5/04;登记生效日:20180316;变更事项:申请人;变更前:常州摩本智能科技有限公司;变更后:常州爱尔威智能科技有限公司;变更事项:地址;变更前:213022 江苏省常州市新北区科五路高新科技园10号楼东楼5楼;变更后:213022 江苏省常州市新北区科五路高新科技园10号楼东楼5楼
2017-11-28
实质审查的生效
状态信息
实质审查的生效;IPC(主分类):A61G5/04;申请日:20170818
2017-11-03
公布
状态信息
公布
摘要
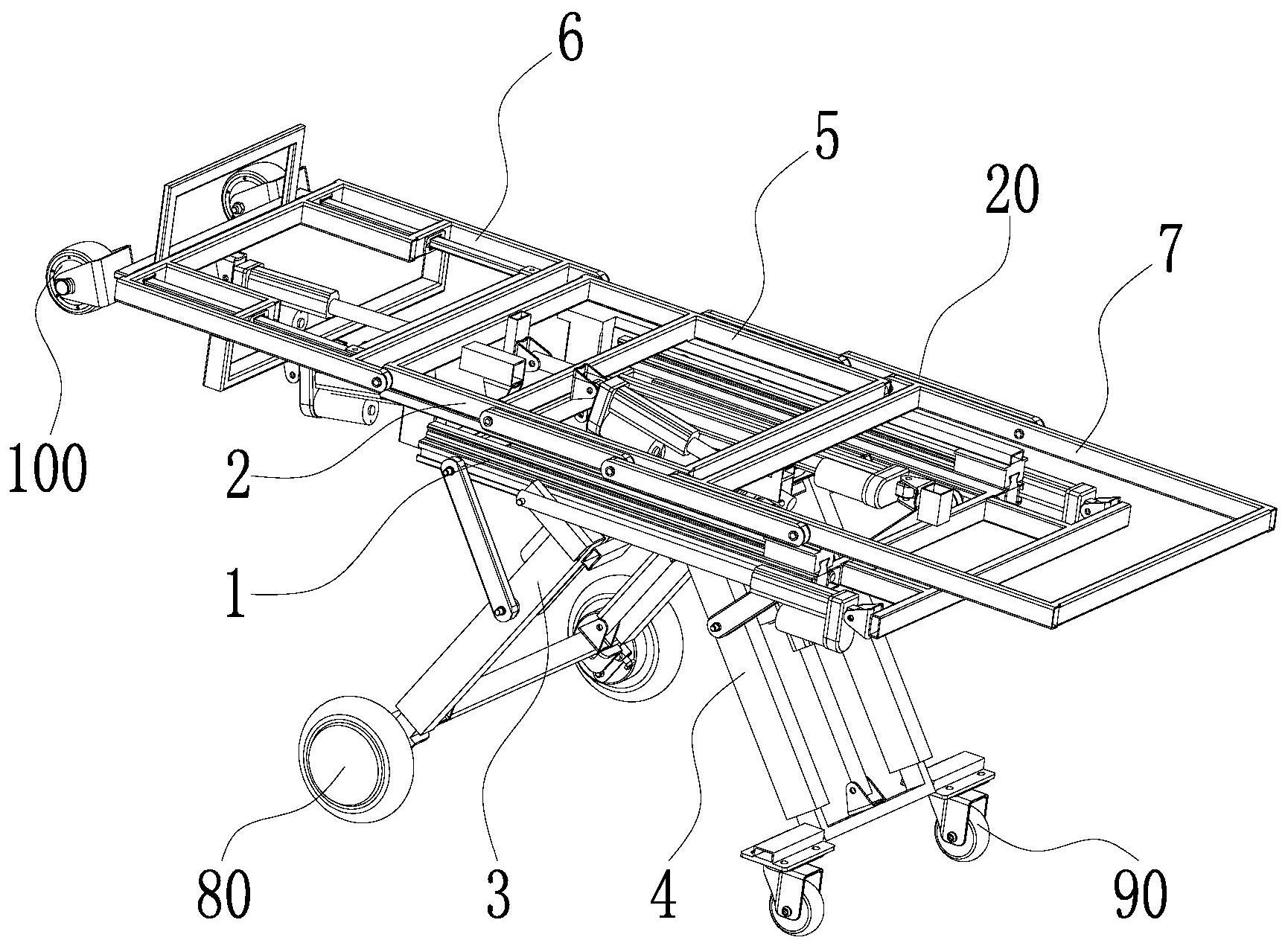
本发明公开了一种载人机器人,包括支撑架、安装于支撑架上的承载架、安装于支撑架底部的第一连杆机构和第二连杆机构;所述第一连杆机构和第二连杆机构分别连接有两第一车轮和两第二车轮;所述承载架包括:安装于所述支撑架上的第一承载部、转动连接于第一承载部前部的第二承载部、以及转动连接于第一承载部后部的第三承载部;所述第一连杆机构连接有可滑动的第一轮架,所述第一连杆机构与第一轮架之间连接有第三电动推杆;所述第二连杆机构连接有可滑动的第二轮架,所述第二连杆机构与第二轮架之间连接有第四电动推杆。本发明具有可上下升降的并可在轮椅模式和担架模式之间转换的优点。
 chinappkf
客服微信号
chinappkf
客服微信号
 chinappsw
商务合作
chinappsw
商务合作
 品牌风云榜
关注公众号
品牌风云榜
关注公众号
CopyRight 2005-2026 品牌网 chinapp.com 版权所有