

授权公布号:CN107187530B
一种自平衡双轮电动车稳定运行控制方法及一种带坐垫及把手的自平衡双轮电动车
有效
申请
2014-09-15
申请公布
2017-09-22
授权
2019-11-12
预估到期
2034-09-15
| 申请号 | CN201710352256.2 |
| 申请日 | 2014-09-15 |
| 申请公布号 | CN107187530A |
| 申请公布日 | 2017-09-22 |
| 授权公布号 | CN107187530B |
| 授权公告日 | 2019-11-12 |
| 分类号 | B62K11/00;B62M6/45 |
| 分类 | 无轨陆用车辆; |
| 申请人名称 | 常州爱尔威智能科技有限公司 |
| 申请人地址 | 江苏省常州市新北区科五路高新科技园10号楼东楼5楼 |
专利法律状态
2019-11-12
授权
状态信息
授权
2017-10-24
实质审查的生效
状态信息
实质审查的生效;IPC(主分类):B62K11/00;申请日:20140915
2017-09-22
公布
状态信息
公布
摘要
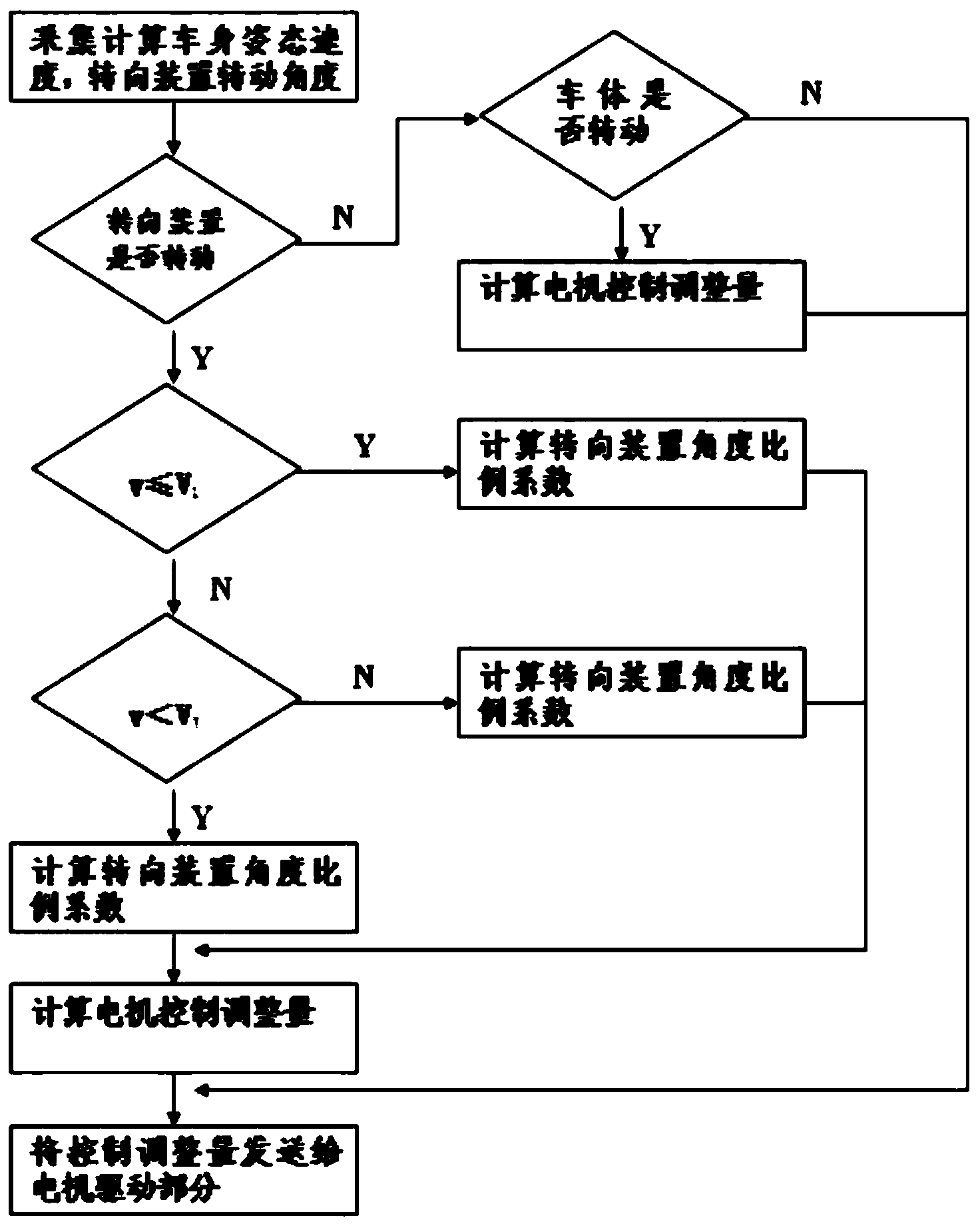
本发明涉及一种自平衡双轮电动车转向检测及控制方法,属于自平衡电动车技术领域,自平衡双轮电动车在运行的过程中加入一定的动力控制调节量,控制车子转弯、前后方向上的运行的稳定性,使车子保持在平稳状态下运行。
 chinappkf
客服微信号
chinappkf
客服微信号
 chinappsw
商务合作
chinappsw
商务合作
 品牌风云榜
关注公众号
品牌风云榜
关注公众号
CopyRight 2005-2026 品牌网 chinapp.com 版权所有