

授权公布号:CN215900129U
轮椅机器人的履带行走机构及轮椅机器人
有效
申请
2021-07-26
申请公布
1970-01-01
授权
2022-02-25
预估到期
2031-07-26
| 申请号 | CN202121701513.7 |
| 申请日 | 2021-07-26 |
| 授权公布号 | CN215900129U |
| 授权公告日 | 2022-02-25 |
| 分类号 | A61G5/06;A61G5/10;A61G5/12 |
| 分类 | 医学或兽医学;卫生学; |
| 申请人名称 | 深圳市迈康信医用机器人有限公司 |
| 申请人地址 | 广东省深圳市龙岗区龙岗大道8288号深圳大运软件小镇13栋3楼(地铁3号线大运站A出口) |
专利法律状态
2022-02-25
授权
状态信息
授权
摘要
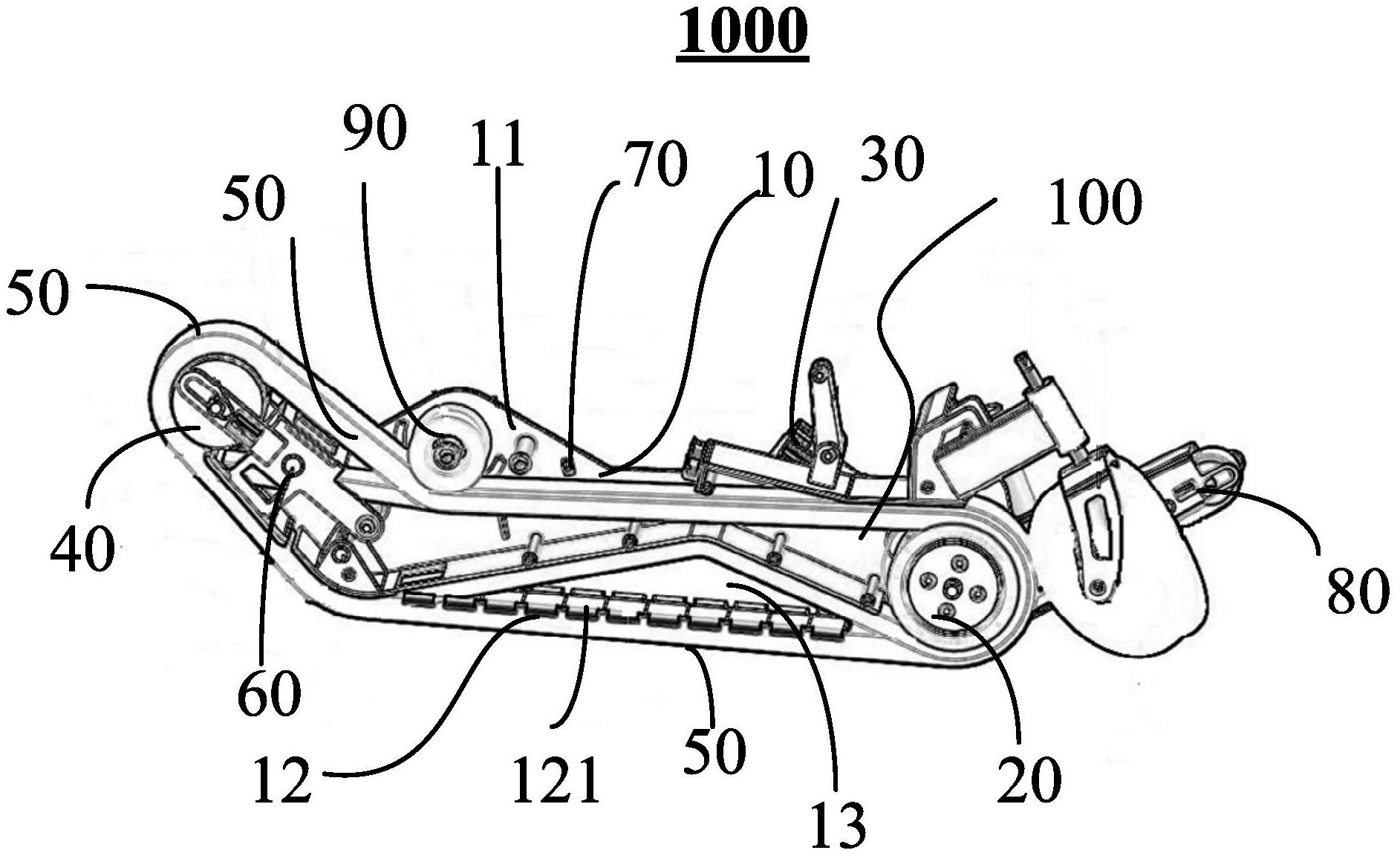
本实用新型适用于轮椅技术领域,提供了一种轮椅机器人的履带行走机构及轮椅机器人,该履带行走机构包括履带机构,该履带机构包括:履带支撑部,其上部设置为履带支撑架,其下部设置为履带卡槽;履带支撑架的底部对应于履带卡槽的位置向上凹陷,由履带支撑架的底面与履带卡槽的顶面构成挖空空间;从动轮,设置于履带支撑架的后端;履带,履带的后端套设于从动轮的外侧;绳索,履带卡槽由多节卡槽组成,两根绳索分别穿过每节卡槽的左、右两侧;绳索的后端套设于从动轮的外侧;伸缩部,与从动轮连接,用于带动从动轮顶出或者缩回。借此,本实用新型的履带行走机构在爬楼梯时,重心降低,提升用户的体验。
 chinappkf
客服微信号
chinappkf
客服微信号
 chinappsw
商务合作
chinappsw
商务合作
 品牌风云榜
关注公众号
品牌风云榜
关注公众号
CopyRight 2005-2026 品牌网 chinapp.com 版权所有