

授权公布号:CN107825137B
一种脉动式穿管装置及其穿管方法
有效
申请
2017-12-01
申请公布
2018-03-23
授权
2023-10-10
预估到期
2037-12-01
| 申请号 | CN201711248510.0 |
| 申请日 | 2017-12-01 |
| 申请公布号 | CN107825137A |
| 申请公布日 | 2018-03-23 |
| 授权公布号 | CN107825137B |
| 授权公告日 | 2023-10-10 |
| 分类号 | B23P21/00 |
| 分类 | 机床;不包含在其他类目中的金属加工; |
| 申请人名称 | 奥美森智能装备股份有限公司 |
| 申请人地址 | 广东省中山市南区大新路01号之一 |
专利法律状态
2023-10-10
授权
状态信息
授权
2018-04-17
实质审查的生效
状态信息
实质审查的生效;IPC(主分类):B23P21/00;申请日:20171201
2018-03-23
公布
状态信息
公布
摘要
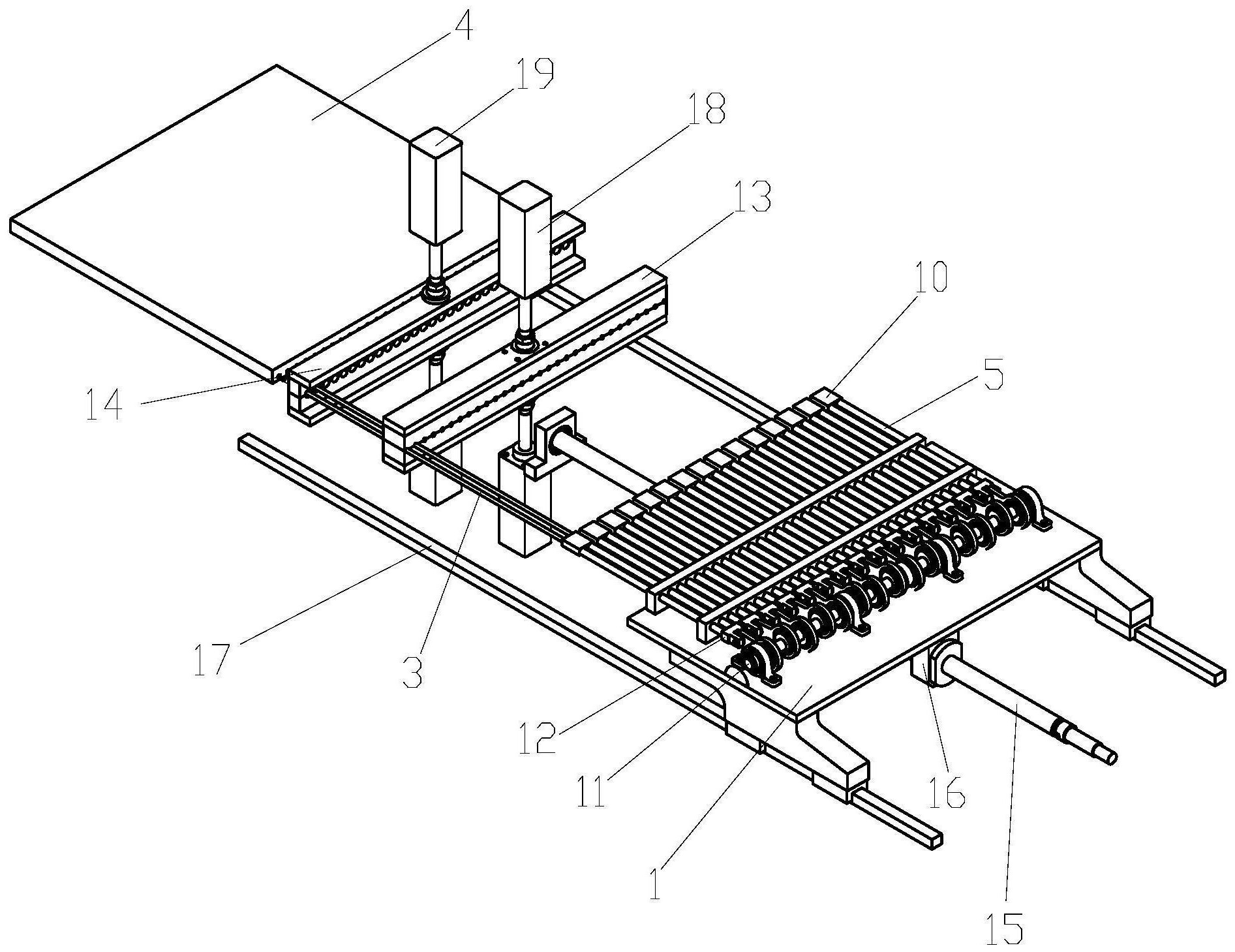
本发明公开了一种脉动式穿管装置及其穿管方法,其技术方案的要点是包括有滑板、管托,在滑板的下方设有驱动滑板运动以带动管托夹紧管件插入工件内的第一驱动装置,在滑板上设有进一步驱动管件作往复运动以顺利插入工件内的偏心机构,偏心机构通过导向杆与所述管托相连。本发明在第一驱动装置驱动多根管件运动插入工件的基础上,偏心机构进一步驱动管件运动,使得多根管件能够脉动式穿入工件内,相对于多根管件同时穿入工件,脉动式穿入工件可以大大减少穿入时的阻力,减少驱动电机的负荷,而且穿管效率比人工穿管效率提高数倍,因为脉动式穿管的阻力比多根管件同时穿管阻力要小很多,因此穿管更加容易,效率也就更高,对管件不会造成损伤。
 chinappkf
客服微信号
chinappkf
客服微信号
 chinappsw
商务合作
chinappsw
商务合作
 品牌风云榜
关注公众号
品牌风云榜
关注公众号
CopyRight 2005-2026 品牌网 chinapp.com 版权所有