

授权公布号:CN109202927B
自动缝纫执行机器人
有效
申请
2018-09-13
申请公布
2019-01-15
授权
2021-03-02
预估到期
2038-09-13
| 申请号 | CN201811069262.8 |
| 申请日 | 2018-09-13 |
| 申请公布号 | CN109202927A |
| 申请公布日 | 2019-01-15 |
| 授权公布号 | CN109202927B |
| 授权公告日 | 2021-03-02 |
| 分类号 | B25J11/00 |
| 分类 | 手动工具;轻便机动工具;手动器械的手柄;车间设备;机械手; |
| 申请人名称 | 杭州恢弘科技有限公司 |
| 申请人地址 | 浙江省杭州市滨江区浦沿街道信诚路555号2幢1901-1912室 |
专利法律状态
2021-03-02
授权
状态信息
授权
2019-02-12
实质审查的生效
状态信息
实质审查的生效
2019-01-15
公布
状态信息
公布
摘要
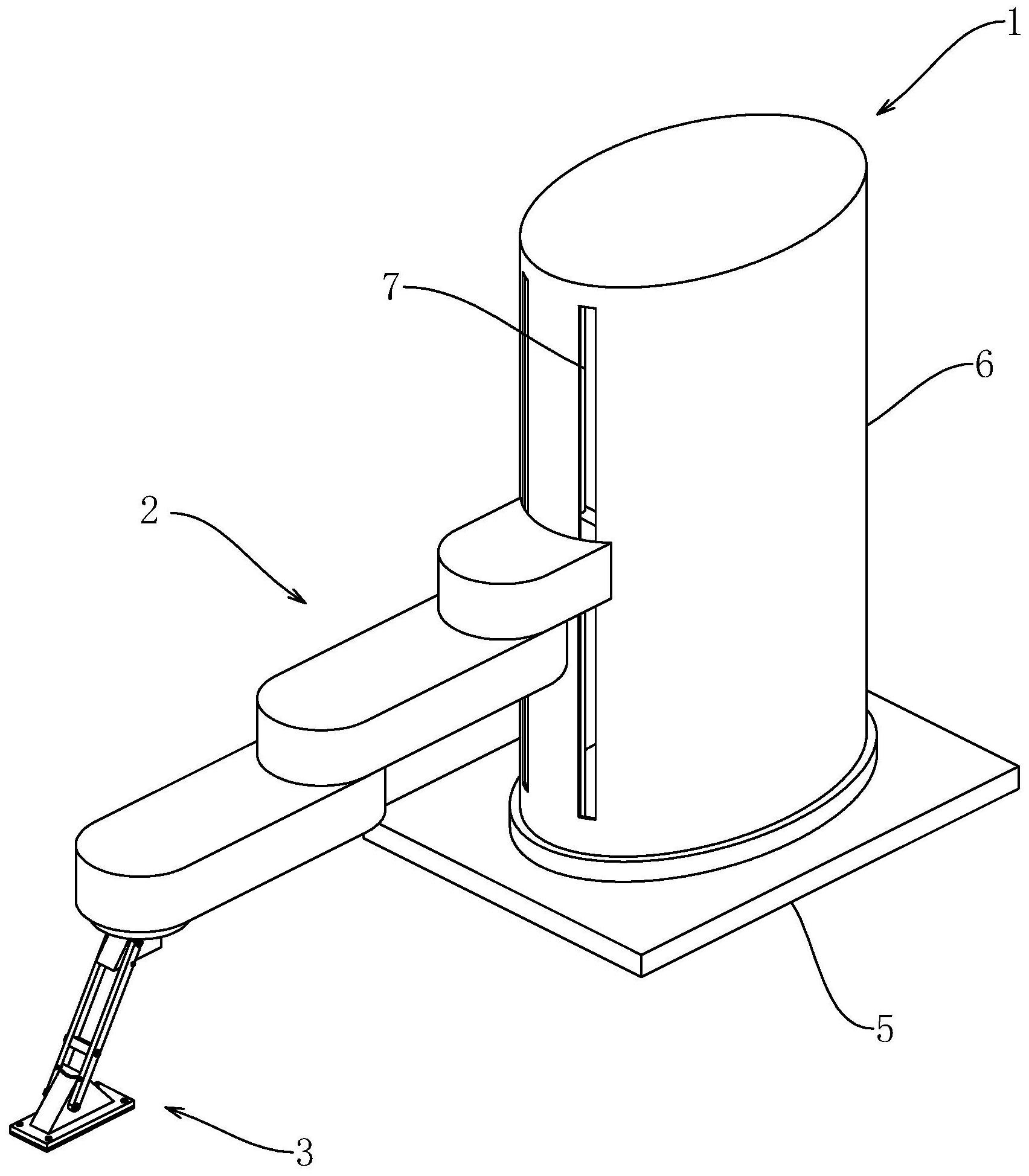
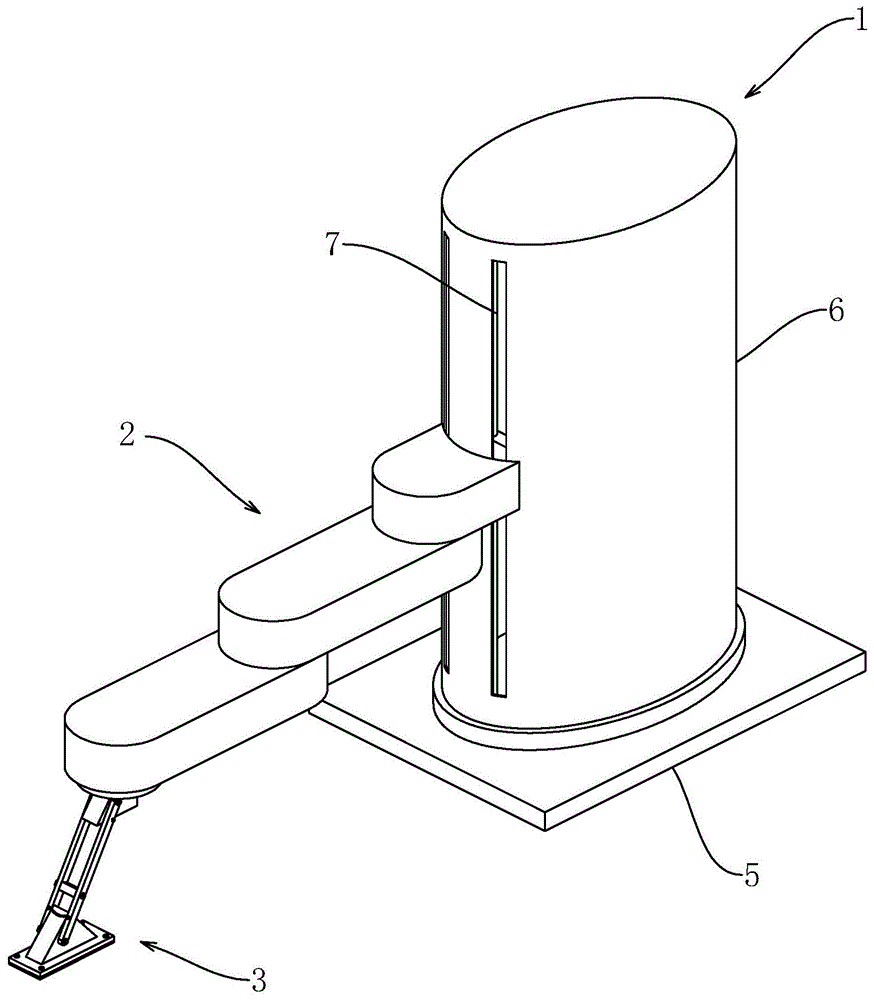
本发明涉及一种缝纫机辅助装置,更具体地说,它涉及一种自动缝纫执行机器人,其优势在于能够用于比较复杂的缝合线结构。一种自动缝纫执行机器人,包括支架、连接在支架上的水平机械手、安装在水平机械手上的压布机构以及带动水平机械手上下运动的升降机构,水平机械手包括沿竖直中心线转动的第一摆臂和位于第一摆臂远离旋转中心的一端沿竖直中心线转动的第二摆臂,压布机构位于第二摆臂远离第一摆臂的一端。升降机构控制压布机构向下压紧布料,通过水平机械手的第一摆臂和第二摆臂的运动使得压布机构能够在水平方向上达到水平范围内的任意位置。因此可以在压紧布料之后沿任意设计好的轨迹运动,适用比较复杂的缝合线结构。
 chinappkf
客服微信号
chinappkf
客服微信号
 chinappsw
商务合作
chinappsw
商务合作
 品牌风云榜
关注公众号
品牌风云榜
关注公众号
CopyRight 2005-2026 品牌网 chinapp.com 版权所有