

授权公布号:CN108933896B
基于惯性测量单元的全景视频稳像的方法及系统
有效
申请
2018-07-30
申请公布
2018-12-04
授权
2020-10-02
预估到期
2038-07-30
| 申请号 | CN201810851461.8 |
| 申请日 | 2018-07-30 |
| 申请公布号 | CN108933896A |
| 申请公布日 | 2018-12-04 |
| 授权公布号 | CN108933896B |
| 授权公告日 | 2020-10-02 |
| 分类号 | H04N5/232 |
| 分类 | 电通信技术; |
| 申请人名称 | 长沙全度影像科技有限公司 |
| 申请人地址 | 湖南省长沙市高新开发区尖山路39号中电软件园一期9栋厂房4层402房 |
专利法律状态
2020-10-02
授权
状态信息
授权
2018-12-28
实质审查的生效
状态信息
实质审查的生效;IPC(主分类):H04N5/232;专利申请号:2018108514618;申请日:20180730
2018-12-04
发明专利申请公布
状态信息
公布
摘要
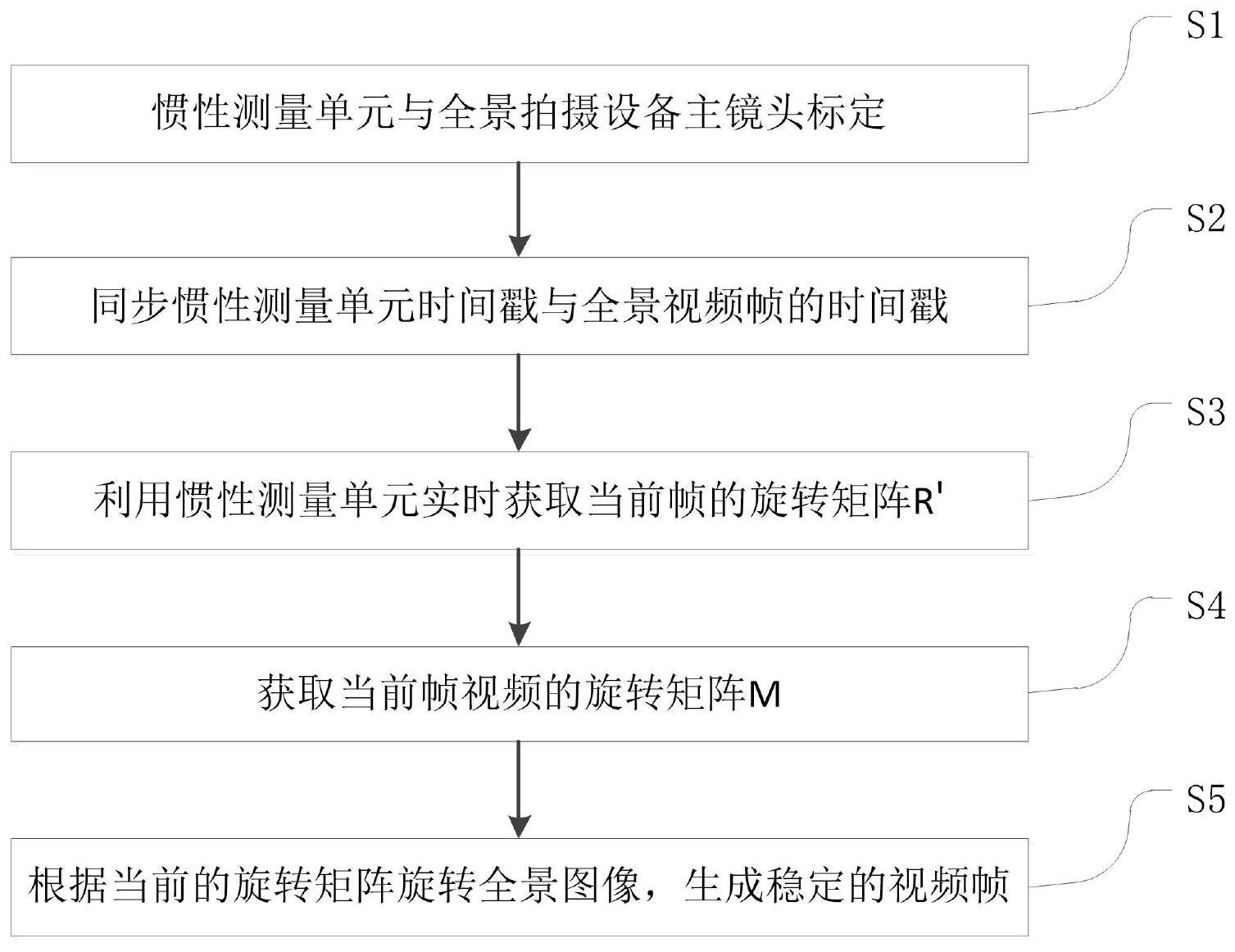
本发明提供了一种基于惯性测量单元的全景视频稳像的方法,包括步骤:S1:惯性测量单元与全景拍摄设备主镜头标定;S2:同步惯性测量单元时间戳与全景视频帧的时间戳;S3:利用惯性测量单元实时获取当前帧的旋转矩阵R′;S4:获取当前帧视频的旋转矩阵M;S5:根据当前的旋转矩阵旋转全景图像,生成稳定的视频帧。本发明还提供了一种用于基于惯性测量单元的全景视频稳像的方法的全景视频稳像系统,包括:全景拍摄模块、惯性测量单元、标定模块、同步模块、计算模块以及处理模块。本发明解决了将全景拍摄设备放置在汽车等载体上,由于汽车等载体在行驶过程中造成全景拍摄设备画面不稳定的问题,提高了用户体验。
 chinappkf
客服微信号
chinappkf
客服微信号
 chinappsw
商务合作
chinappsw
商务合作
 品牌风云榜
关注公众号
品牌风云榜
关注公众号
CopyRight 2005-2026 品牌网 chinapp.com 版权所有