

授权公布号:CN211030063U
一种互相协调且不干涉的机器人手指装置
有效
申请
2019-11-29
申请公布
1970-01-01
授权
2020-07-17
预估到期
2029-11-29
| 申请号 | CN201922104562.1 |
| 申请日 | 2019-11-29 |
| 授权公布号 | CN211030063U |
| 授权公告日 | 2020-07-17 |
| 分类号 | B25J15/08 |
| 分类 | 手动工具;轻便机动工具;手动器械的手柄;车间设备;机械手; |
| 申请人名称 | 广州今甲智能科技有限公司 |
| 申请人地址 | 广东省广州市番禺区大石街石北工业路684号(巨大创意产业园)12栋716A |
专利法律状态
2020-07-17
授权
状态信息
授权
摘要
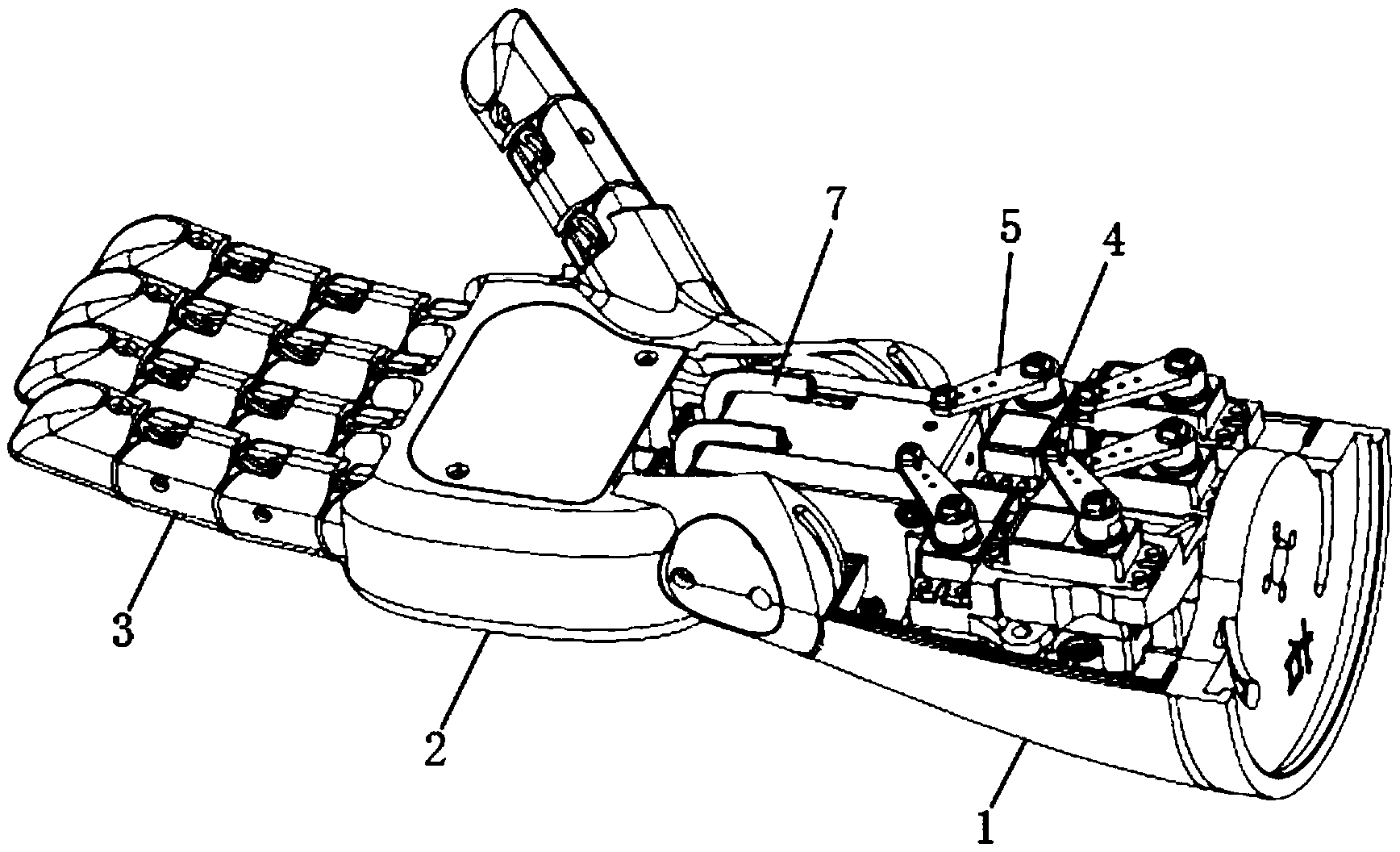
本实用新型公开了一种互相协调且不干涉的机器人手指装置,涉及机器人的技术领域,解决了现有技术中手指之间的协调能力差,动作过程中容易相互干涉的技术问题。它包括前臂、手掌和五根手指,所述前臂内设有与手指数量一致的驱动电机,所述驱动电机的转子上安装有收卷盘,所述收卷盘上安装有绳索,所述绳索依次穿过前臂、手掌以及手指的内部,并安装在所述手指的末端,且一根所述绳索安装在一根手指上,所述手指的关节处设有复位弹簧。本实用新型结构合理、可靠性高且成本低,各手指之间的协调能力好,而且各手指均可独立的进行动作,互不干涉。
 chinappkf
客服微信号
chinappkf
客服微信号
 chinappsw
商务合作
chinappsw
商务合作
 品牌风云榜
关注公众号
品牌风云榜
关注公众号
CopyRight 2005-2026 品牌网 chinapp.com 版权所有