

授权公布号:CN111206761B
一种机械臂自动解锁的机器人爬架
有效
申请
2020-01-16
申请公布
2020-05-29
授权
2021-10-15
预估到期
2040-01-16
| 申请号 | CN202010050277.0 |
| 申请日 | 2020-01-16 |
| 申请公布号 | CN111206761A |
| 申请公布日 | 2020-05-29 |
| 授权公布号 | CN111206761B |
| 授权公告日 | 2021-10-15 |
| 分类号 | E04G3/28 |
| 分类 | 建筑物; |
| 申请人名称 | 深圳市特辰科技股份有限公司 |
| 申请人地址 | 广东省深圳市罗湖区深南东路2017号华乐大厦6楼 |
专利法律状态
2023-04-04
专利权的保全及其解除
状态信息
专利权的保全;IPC(主分类):E04G3/28;申请日:20200116;授权公告日:20211015;登记生效日:20230214
2021-10-15
授权
状态信息
授权
2020-06-23
实质审查的生效
状态信息
实质审查的生效;IPC(主分类):E04G3/28;申请日:20200116
2020-05-29
公布
状态信息
公布
摘要
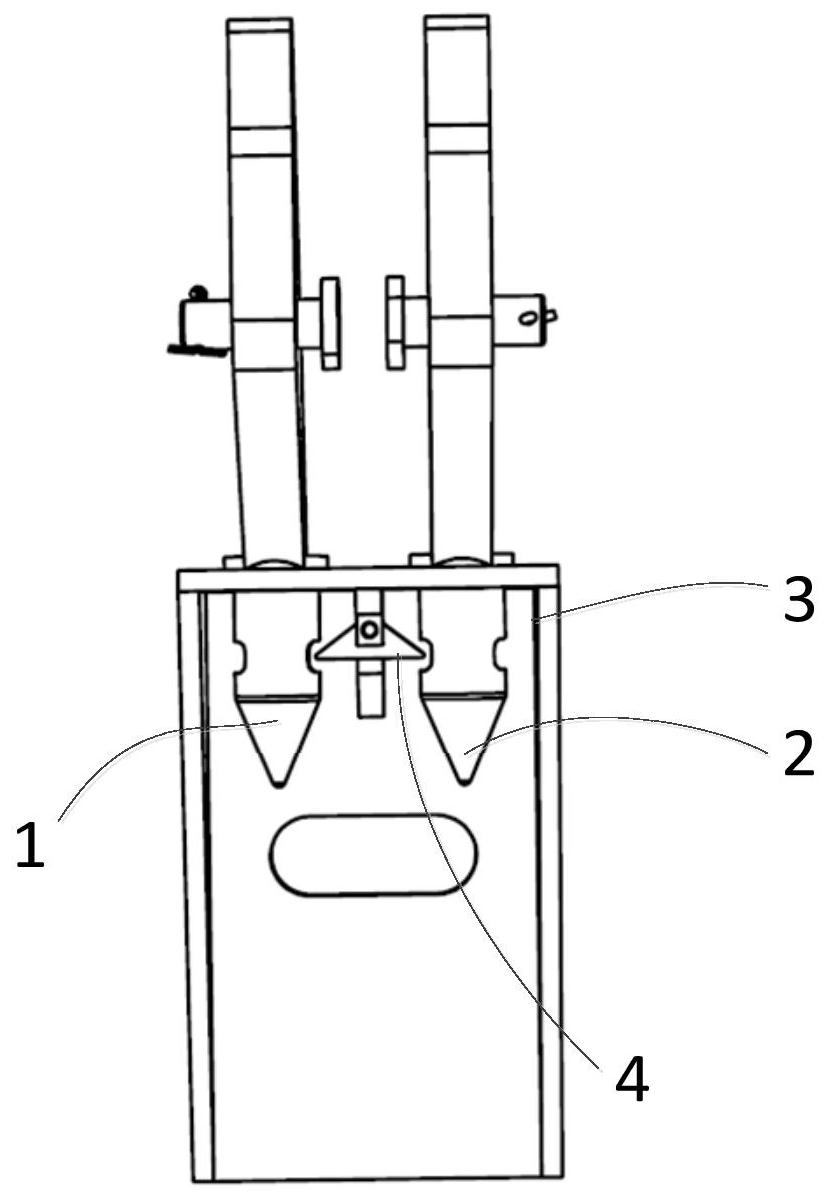
本发明公开了一种机械臂自动解锁的机器人爬架,包括第一、第二导轨和附墙座,第一、第二导轨分别连接有至少一个第一、第二机械臂,附墙座设置有可摆动的摆锁,每一附墙座上开设两个定位孔;第一机械臂和第二机械臂完全插入定位孔内时分布在摆锁的两侧,且摆锁同时卡入第一机械臂和第二机械臂内,且在第一机械臂和第二机械臂受到外力作用而同步上升时,摆锁被第一、第二机械臂同时卡住而防止第一、第二机械臂继续同步上升而脱离附墙座;第一、第二机械臂单独在对应的定位孔中上升或下降时,带动摆锁摆动以便第一、第二机械臂脱离或者插入附墙座,本发明既可以在机械臂整体脱离前自动上锁防止脱离,又可以在其中一个导轨单独爬升或下降时自动解锁。
 chinappkf
客服微信号
chinappkf
客服微信号
 chinappsw
商务合作
chinappsw
商务合作
 品牌风云榜
关注公众号
品牌风云榜
关注公众号
CopyRight 2005-2026 品牌网 chinapp.com 版权所有